Solving and Matching Views
Ocula's solving and matching nodes take care of aligning your cameras, repairing views, and matching color and focus. Most of these nodes depend on disparity information describing the difference between corresponding pixels in stereo views. Ocula's O_Solver and O_DisparityGenerator automatically generate this information for you.
|
|
|

See Solver and DisparityGenerator for more information.
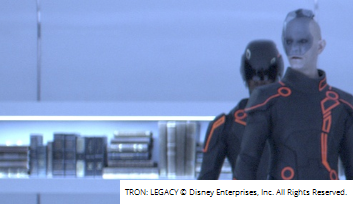
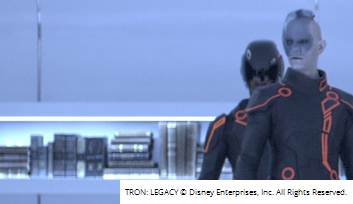
The other nodes in this section use disparity maps to take the pain out of alignment, color correction, and focus matching by comparing views to correct the issue. The image below shows focus matching a poorly focused left view from a right view.
|
|
|
Poorly focused left view. |
Corrected left view. |