Featured
User Guide
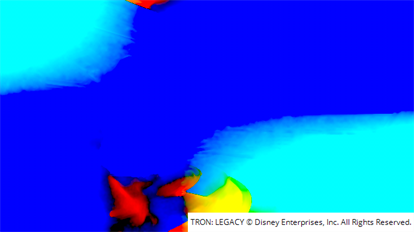
An introduction to creating a disparity map for stereo images. Disparity describes the location of a pixel in one view in relation to the location of its corresponding pixel in the other view.
User Guide

Correcting color differences in post-production can be time-consuming. O_ColourMatcher automates some of the color grading required.
User Guide

Ocula includes several tools to check stereo quality, including O_DisparityViewer, DisparityReviewGizmo and StereoReviewGizmo.
Tutorials

Jon Starck demonstrates the use of O_MultiSample node to fix errors in disparity vectors.
Tutorials

Jon Starck demonstrates the use of the alignment toolset in Ocula 4 to set-up and review the O_Solver and O_VerticalAligner nodes.
Resources
A reference guide the data each Ocula node requires in its inputs (in addition to a stereo pair of images).