Inputs
O_DisparityToDepth has the following inputs:
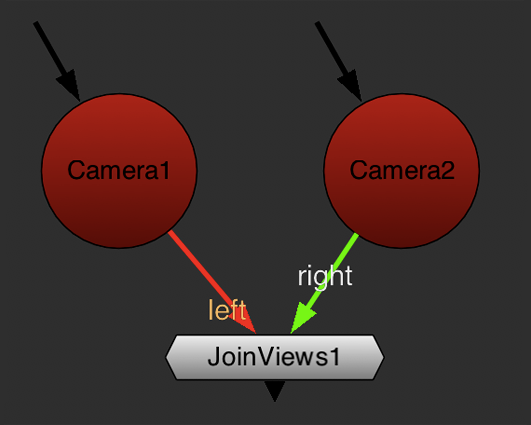
| Camera |
A pre-tracked Nuke stereo camera that describes the camera setup that is used to shoot the Source images. This can be a camera you have tracked with the CameraTracker node or imported to Nuke from a third-party camera tracking application. In Nuke, a stereo camera can be either: • a single Camera node in which some or all of the controls are split, or • two Camera nodes (one for each view) followed by a JoinViews node (Views > JoinViews). The JoinViews node combines the two cameras into a single output.
|
||||
|
Disparity |
A stereo pair of images. O_DisparityToDepth requires upstream disparity vectors. If they do not already exist, insert an O_DisparityGenerator node after the image sequence to calculate them. See DisparityGenerator for more information. |

To see a table listing the nodes or channels each Ocula node requires in its inputs, see Node Dependencies.