矩阵修饰符
基质混合
您可以使用此通道修改器在一对“旋转”或“平移”输入矩阵之间进行混合。
|
Matrix A/Matrix B |
指定要混合到这些通道中的两个矩阵。这些可以是3D项的世界或局部变换矩阵,也可以是其他“通道修改器”项输出的矩阵。为了获得最佳结果,请使用相同类型的矩阵链接通道。 |
|
Blend |
Modo使用此混合量将其应用于输入矩阵。的值为0%, Modo输出Matrix A不变的矩阵;与100%Modo输出矩阵B不变的矩阵。对于介于0%和100%之间的值, Modo在两个输入之间插值矩阵。对于旋转矩阵, Modo使用四元数插值,对于平移矩阵, Modo使用线性插值。 |
|
Matrix Output |
Modo将插值结果传递到此通道。您可以将其链接到3D项或另一个Channel Modifier上的兼容矩阵通道。 |
矩阵撰写
矩阵组合通道修改器将两个或多个输入矩阵相乘,然后传递结果转换矩阵。
|
Matrix Inputs |
该通道接受来自3D项的矩阵通道或其他通道修改器输出的多个输入链接。Modo将矩阵与该通道链接时所使用的顺序相乘。 |
|
Matrix Output |
Modo将组成的矩阵输出到此通道。您可以将其链接到3D项目或另一个Channel Modifier的输入上的兼容矩阵通道。 |
矩阵构造
矩阵构造修改器根据矢量创建4x4变换矩阵。
|
Input X/Input Y/Input Z |
描述结果矩阵的位置或比例。 |
|
Matrix Type |
指定输出是位置矩阵还是比例矩阵。 |
|
Output |
Modo将合成的矩阵传递到此通道。 |
欧拉矩阵
的Matrix From Euler修饰符从4x4旋转矩阵中提取一个向量,该向量表示X,Y和Z轴上的旋转角度。
|
Input X/Input Y/Input Z |
描述围绕X,Y和Z轴的旋转角度。 |
|
Rotation Order |
描述三个轴的旋转顺序。使用默认ZXY订购, Modo通过创建代表Z轴的矩阵,然后创建代表X轴的矩阵,最后创建代表Y轴的矩阵来计算最终矩阵。Modo然后将三个矩阵相乘以构造最终矩阵。 |
|
Output |
输出结果旋转矩阵。 |
矩阵到欧拉
的Matrix To Euler修饰符从4x4旋转矩阵中提取代表X,Y和Z轴旋转角度的向量。
|
Input X/Input Y/Input Z |
指示从中提取旋转角度的输入旋转矩阵。 |
|
Rotation Order |
描述三个轴的旋转顺序。使用默认ZXY订购, Modo通过创建代表Z轴的矩阵,然后创建代表X轴的矩阵,最后创建代表Y轴的矩阵来计算最终矩阵。Modo然后使用这三个矩阵构造最终矩阵。 |
|
Output X/Output Y/Output Z |
描述围绕X,Y和Z轴的旋转角度。 |
矩阵求逆
的Matrix Invert修饰符可反转存储在输入矩阵中的变换。例如,如果输入矩阵存储90、45和180度的旋转,则输出矩阵存储相反的:-90,-45和-180度。它还输出位置和比例的倒数,或所有这三个的组合。
该修饰符可能非常有用,因为经常需要在世界中心执行复杂的3D数学运算。将变换矩阵与其逆变换矩阵相乘,得到一个单位矩阵。也就是说,不存储位置,旋转和100%比例的矩阵。这使您可以轻松地将项目转换回其中心位置,轻松执行数学运算,然后通过乘以原始转换将其转换回。
|
Input |
矩阵求逆。 |
|
Output |
所得的逆矩阵。 |
矩阵转置
矩阵转置修改器将主对角线上的4x4矩阵反转。Modo反转存储在矩阵中的任何旋转;因此,例如,X的90度旋转变为-90度的旋转。
|
Input |
指示具有要转置的值的矩阵。 |
|
Output |
指示在哪里Modo应该将转置后的值传递给矩阵。 |
矩阵向量
您可以使用此通道修改器从“旋转”矩阵或“平移”矩阵中提取平移方向矢量。旋转矩阵中的方向向量是在分别执行X,Y和Z旋转之后形成的轴。例如,给定3D项目的“世界旋转”矩阵,“ Z方向”矢量指向该项目所面对的方向,而“ Y”轴指向该项目的顶部。
|
Matrix Input |
将要从中提取矢量的矩阵通道链接到该通道。这可以是3D项的矩阵通道,也可以是另一个Channel Modifier的输出矩阵。 |
|
Row |
这指定是从“旋转”矩阵中提取X,Y,Z方向矢量还是从“平移”矩阵中提取平移。 |
|
Output X/Output Y/Output Z |
从矩阵提取的矢量传递到这三个通道。 |
矩阵向量相乘
的Matrix Vector Multiply修饰符将变换矩阵乘以向量,然后输出结果向量。这实际上将存储在矩阵中的所有变换应用于矢量。例如,如果向量在[X,0.0,0.0,0.0]中存储值,矩阵在X中存储2m的位置,则所得向量将为[3.0,0.0,0.0]。
与旋转矩阵一起使用时,此修饰符非常有用。例如,如果您有一个从空间中某个点发射的光线,通过将光线矢量乘以旋转矩阵,您可以轻松地更改光线的方向,并通过将矩阵中存储的任何值旋转。
|
Matrix |
向量乘以的矩阵。 |
|
Input |
要乘以矩阵的向量。 |
|
Output |
所得向量。 |
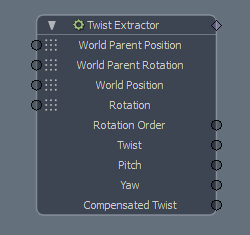
扭曲提取器
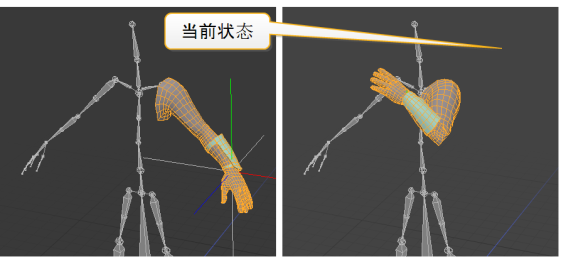
使用此通道修改器可以从局部矩阵提取扭曲(滚动),偏航和倾斜。然后,扭曲输出可用于平滑变形,例如,在旋转手腕时在下臂或在脚部旋转时在小腿上。
例如,如果在装备中有一个关节并对其应用了旋转,则可以使用“扭曲提取器”节点将旋转传递到另一个关节。
要添加“扭曲提取器”节点,请在逻辑示意图中单击Add...然后在Channel Modifiers > Matrix,点击Twist Extractor。
节点将关节的扭曲与“设置”状态或层次结构中的另一个关节进行比较。
注意: 有关设置模式的更多信息,请参见绑定和设置模式。
节点上的扭曲提取器通道
|
World Parent Position |
所选关节的父关节的世界位置。 |
|
World Parent Rotation |
所选关节的父关节的世界旋转。 |
|
World Position |
所选关节的世界位置。 |
|
Rotation |
选定关节的旋转。 |
|
Rotation Order |
矩阵提取的旋转顺序。 |
|
Twist |
所选关节围绕纵轴的旋转。也称为滚动。 |
|
Pitch |
所选关节绕横轴旋转。 |
|
Yaw |
所选关节围绕垂直轴的旋转。 |
|
Compensated Twist |
旋转关节时,它所采用的路径会影响目标位置的方向。例如,手臂被握持时的方位与手臂被握持时的方位不同。以Twist,Yaw,Pitch, Modo计算补偿的扭曲值,以确保目标位置的方向相同。 |
设定范例
在Setup模式下,“扭曲提取器”将旋转值与关节的设置状态进行比较,并提取差值。
| 1. | 连接Location所选关节的通道Rotation扭曲提取器上的通道。 |
节点从当前旋转与设置一旋转之间的差异获得扭曲数据。
| 2. | 然后,您可以将关节连接到Twist扭曲提取器的通道来驱动其Rotation具有提取值的通道。 |
标准范例
在“标准”模式下,可以使用“扭曲提取器”节点比较选定关节与其父级或层次结构中另一个关节之间的扭曲。然后,您可以使用该值来驱动其他关节的旋转。
确保在原理图中具有“扭曲提取器”节点和相关的关节节点。对于关节,您需要使用World Position和World Rotation渠道。要将它们添加到示意图中,请选择关节,然后打开Channels右面板上的视口,然后将所需的通道拖到“示意图”中的节点上。
| 1. | 选择要从中提取旋转的关节。 |
| 2. | Shift+单击“扭曲提取器”节点,将其添加到选择中。 |
这将在右侧面板上打开“扭曲提取器”节点的属性。
| 3. | 确保Setup Mode 被禁用,并且Rotation Order Input是Automatic: Twist First。 |
| 4. | 在“扭曲提取器”属性中,单击Auto Connect按钮。 |
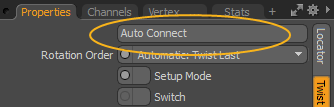
这将添加选定关节的World Position和World Rotation引导到节点上并将它们连接到Twist Extractor的World Position和Rotation渠道。
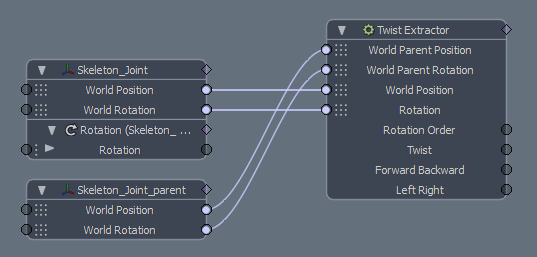
| 5. | 添加要对其应用旋转的关节,并将其“旋转”通道连接到“扭曲提取器”的Twist, Forward Backward和Left Right渠道。 |
旋转值将应用于选定的关节。
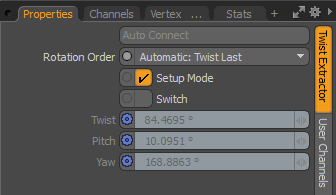
扭曲提取器属性
|
Auto Connect |
什么时候Setup Mode如果禁用此选项,则可以使用此选项将选定的定位器连接到“扭曲提取器”节点。在选择了定位器和“扭曲提取器”后,单击此按钮可自动设置定位器和“扭曲提取器”节点之间的连接。 注意: 什么时候Setup Mode已启用Auto Connect不可用。 |
|
Rotation Order |
从矩阵中提取旋转的顺序。除了轴的特定顺序外,您还可以选择以下选项: • Automatic: Twist First -默认选项。它从扭曲轴开始提取旋转,而其他旋转则按照直接旋转的顺序进行。Z通常是关节旋转轴,因此顺序为ZXY。 • Automatic: Twist Last -它使用扭曲轴作为最后一个,而其他则以直接旋转的顺序跟随。通常,Z是关节旋转轴,因此顺序为XYZ。 |
|
Setup Mode |
启用后(默认状态),扭曲提取器将从当前旋转与设置旋转之间的差中提取扭曲数据。禁用后,可以使用“扭曲提取器”从关节与其父级或层次结构中的另一个定位器进行比较来获取扭曲值。 |
|
Switch |
扭曲提取器以两种不同的方式计算扭曲。如果默认计算未产生预期结果,请启用Switch用另一种方法来计算扭曲 |
|
Twist |
所选关节围绕纵轴的旋转。也称为滚动。 |
|
Pitch |
所选关节绕横轴旋转。 |
|
Yaw |
所选关节围绕垂直轴的旋转。 |