平面IK
逆运动学(IK)是一种对项目进行动画处理的方法,其中软件可以计算关节的弯曲度 基于目标对象的位置。在Modo,目标对象通常是定位器。为一系列项目设置IK之后,当目标项目移动并根据需要修改关节旋转时,IK层次结构将使该项目持续到达目标。
使用IK,动画一个项目(目标)的位置要比动画几个独立项目的旋转要容易得多。例如,要使用IK对门把手上的手进行动画处理,可以将目标放置在门把手上,并且手在场景中的适当位置。在标准层次结构中,必须分别旋转肩膀和肘部以找到手的正确位置。
Modo的Planar IK系统可以很好地用于双关节,例如上一个示例中提到的手臂,但是还可以为三个定位关节(例如动物的腿)设置动画。
注意: 您可能还认为功能更强大全身IK系统,使您可以装配整个角色。
将IK应用于定位器链
要将IK应用于项目链,请首先创建层次结构:
• 使这些项目在降序链中彼此父级化。
• 确保中心位置也位于正确的位置。对于Modo为了正确计算IK,所有“中心”位置必须共享至少一个轴值才能出现在同一平面上。
• 确保链条弯曲,以便在Modo应用IK,可以使用首选角度进行弯曲。
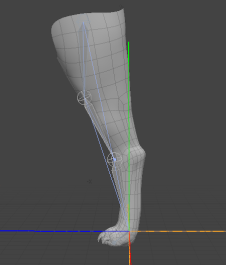
小费: 在3D视口中启用“覆盖工程图”以使关节在网格内可见。
| 1. | 项目按顺序排列后,请按降序选择项目。 |
| 2. | 通过单击设置模式进入设置模式 |
黄色框出现在3D视口周围,表明您处于设置模式。
注意: 有关使用设置模式的更多信息,请参见绑定和设置模式。
| 3. | 在设置工具栏中,转到Inverse Kinematics标签和下Planar IK, 点击Apply IK按钮。 |
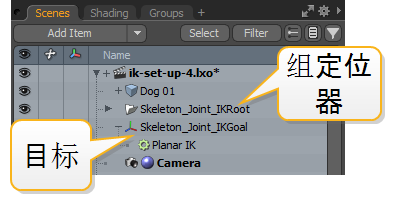
将IK修改器应用于链会创建一个目标项目,并添加一个组定位器作为IK链的整体父级。
注意: 如果您的关节不共享轴,则会显示警告。请点击OK使您的项目沿X轴对齐。
| 4. | 退出设置模式。 |
通过移动目标项目, Modo修改IK链中关节的角度。
使FK与当前IK位置匹配
移动目标项目并希望正向运动学(FK)匹配其位置时,可以将FK设置为使用当前IK位置。
| 1. | 选择目标定位器(称为Skeleton_Joint_IKGoal默认情况下),然后将其移动到所需位置。 |
| 2. | 选择目标项目后,“平面IK”属性将在Properties标签。点击Set FK to Current button。 |
| 3. | 通过设置禁用IK Blend到0%。 |
关节链的起始位置移至新位置。
将IK与FK匹配
您可以使用重置链到起始位置Reset Solver从IK按钮中Properties。例如,这使您可以返回到编辑各个关节。
| 1. | 选择目标项目 在项目列表中,然后转到Properties右下角的标签。 |
| 2. | 点击Reset Solver from IK按钮。 |
IK解算器和关节链将重置为起始位置。
平面IK属性
在目标中选择目标项目Item List显示与IK链相关的属性。
|
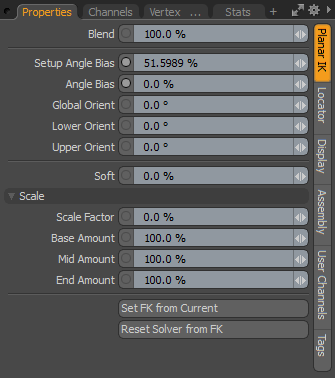
Blend |
设置为100% 完全使用IK解决方案。低于100%的值会降低IK对链的影响,而将其设置为0%会禁用它。 |
|
Setup Angle Bias |
指定链的静止状态。应该在设置模式下调整此设置,以为链中的关节提供默认行为。 |
|
Angle Bias |
控制关节朝向链的起点或终点的权重。退出设置模式后,您可以调整或设置关键帧Angle Bias选项来更改特定动画的链的行为。此金额已添加到Setup Angle Bias。所以如果你有一个Setup Angle Bias 50%和Angle Bias如果角度为10%,则用于关节角度的总偏差为60%。 单独的控件使您可以在“设置”模式下调整链,而无需重做对动画偏差所做的任何更改。 注意: Angle Bias仅适用于三节链。 |
|
Global Orient |
指定IK链的平面方向角。例如,对于手臂,您可以调整肘部指向的角度。 |
|
Lower Orient |
指定三关节链的下部两个关节的平面取向角。 注意: Lower Orient仅适用于三节链。 |
|
Upper Orient |
指定三关节链的上部两个关节的平面取向角。 注意: Upper Orient仅适用于三节链。 |
|
Soft |
过度延伸关节时,默认情况下它会捕捉到目标位置。增大此值将消除对齐并产生较慢的过渡。 |
|
Scale |
|
|
Scale Factor |
当目标点距离关节长度的总和太远时,IK解算器可以缩放关节以匹配目标位置。0%表示不缩放,而100%时关节完全缩放。的Base, Mid和End Amount设置可用于确定比例量在各个关节上的分布。 |
|
Base Amount |
仅缩放第一个关节。 |
|
Mid Amount |
仅缩放中间关节。 |
|
End Amount |
仅缩放最后一个关节。 |
|
Set FK from Current |
使FK与IK的当前位置匹配。有关如何执行此操作的更多信息,请参见使FK与当前IK位置匹配。 |
|
Reset Solver from FK |
从链中删除IK,并允许您单独编辑关节。有关如何执行此操作的更多信息,请参见将IK与FK匹配。 |
创建IK Up矢量
该向量定义了IK约束的向上方向,可以帮助在动画期间保持链正确定向。的Create IK Up Vector按钮类似于分配向量命令除非您不需要创建和定位定位器。用Create IK Up Vector, Modo根据首选的弯曲角度自动生成定位器。提供新的“向上矢量”定位器后,可以对其进行动画处理以调整IK绑定的方向。这类似于调整Global Orient在IK中设置Properties面板。您也可以将IK Up Vector与Global Orient产生任何所需的方向。