匹配和解决变形
C_GlobalWarp使用与C_CameraSolver相似的特征检测,将特征定位在相邻摄像机对的重叠区域中。然后,变形将使用这些功能找到每个输入视图的最佳拟合网格变形,以减少重影。
扭曲序列:
| 1. | 将C_GlobalWarp节点连接到C_CameraSolver节点的输出。 |
| 2. | CaraVR会在当前帧自动添加一个关键帧,但是您可以通过以下任一方法手动添加关键帧: |
• 在查看器中进行擦洗,然后单击Add Key (![]() )在当前帧处添加关键帧,或者
)在当前帧处添加关键帧,或者
• 点击Key All在整个序列中添加关键帧Step间隔。
如果您的动作顺序很多,请设置Step间隔减小到较低的值,以便在针迹中说明帧之间的较大差异。相反,对于更多的静态序列,较高的值可能会产生更好的结果。
• 点击Import并选择要从中导入关键帧的节点。您可以从脚本中的C_CameraSolver,C_Stitcher,C_GlobalWarp或C_ColourMatcher的任何实例导入关键帧。
默认情况下,还将导入C_CameraSolver中的所有匹配项。如果不需要求解器的匹配项,请禁用Import available matches。
注意: C_Stitcher仅在指定的关键帧上计算光流摄像机的翘曲,而忽略不属于同一关键帧的上游动画。使用Import按钮可从C_CameraSolver复制所有关键帧。这样,在摄像机中添加的所有其他按摄像机手动关键帧Cameras标签也被复制。
手动添加关键帧可以帮助插值不正确的现有关键帧之间出现模糊区域。
您添加的关键帧越多,过程花费的时间就越长,尽管您可能会获得更好的结果。全局变形器将输入图像混合以创建最终变形的帧。
| 3. | 请点击Match 比较重叠相机上的关键帧以获取共享功能。CaraVR仅在默认情况下重叠的摄像机中查找匹配项。 |
注意: Match同时计算装备中所有摄像机的功能匹配,因此无需在立体声设置中分别计算左右图像的功能匹配。看到拼接立体钻机了解更多信息。
| 4. | 点击Camera Matches |
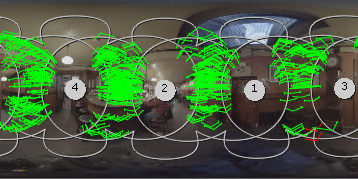
摄像机匹配在两个视图中都代表一个要素,并且代表该要素的估计弯曲目标。例如,图像在视图2和4中显示了烟雾探测器,并且在两者之间出现了翘曲目标点。
|
|
|
|
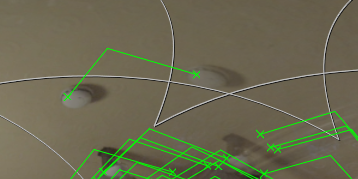
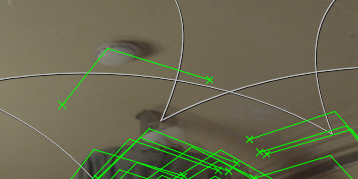
经前比赛。 |
翘曲目的地。 |
| 5. | 请点击Warp计算翘曲。 |
注意: 扭曲是同时为装备中的所有摄像机计算的,因此无需在立体声设置中为左右图像分别计算它们。看到拼接立体钻机了解更多信息。
变形的预览图像显示在查看器中。看到对匹配和扭曲进行故障排除有关改善翘曲效果的信息。
当您对初始整体变形满意时,可以添加约束以减少直线输入图像中已知直线上的变形。看到约束翘曲了解更多信息。