约束翘曲
扭曲序列会使直线变形,这是应用于摄影机视图的全局扭曲的一部分。在直线输入图像中向已知直线添加约束可以通过固定全局扭曲中的区域来减少这种变形。
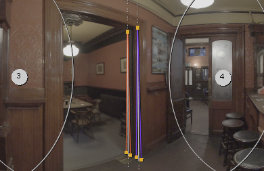
通常,将约束应用于出现在两个相邻视图中的要素,然后C_GlobalWarp确保将这些标记的区域扭曲到相同的目的地。
|
|
|
|
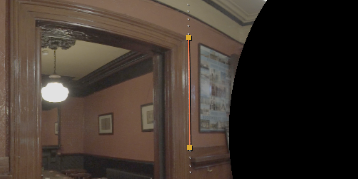
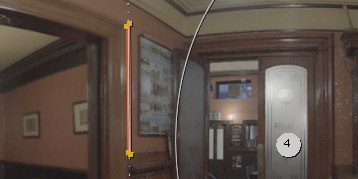
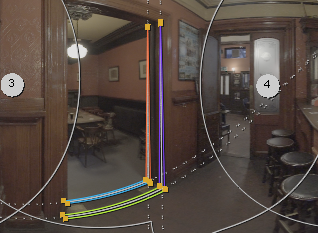
在Cam3和Cam4中标记的约束。 |
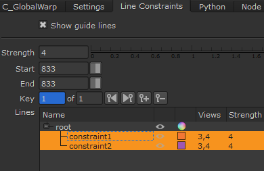
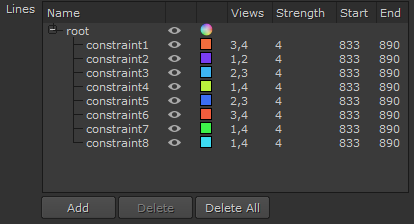
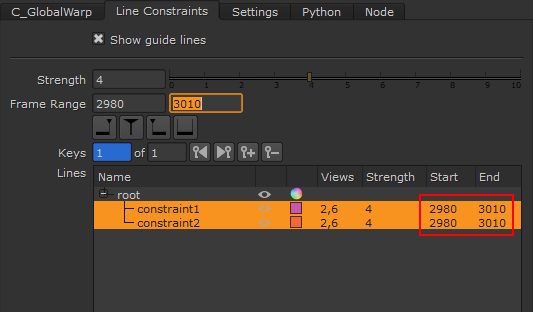
约束中Properties面板。 |
查看变形的图像
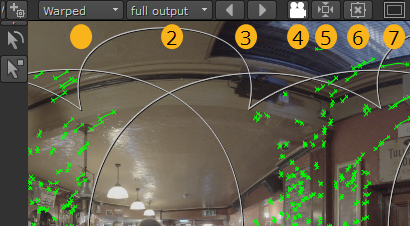
您可以使用查看器左上角的工具查看完整输出或单个视图。每个视图都可以作为变形结果或latlong和直线形式的源视图。
|
1个 |
输出方式 |
在扭曲的输出和C_CameraSolver的源latlong之间切换查看器。 |
|
2 |
输出视图 |
将视图设置为输出。您可以按相机选择单个视图,也可以检查full output。 |
|
3 |
上一个/下一个视图 |
在输出视图之间快速交换。 |
|
4 |
投影 |
在查看器中在latlong和直线显示之间切换。 |
|
5 |
中间视角 |
在直线或单摄像机视图中,单击以使视图居中。此按钮在full output模式。 |
|
6 |
重置旋转 |
单击以重置应用于C_GlobalWarp中摄像机的所有旋转。 |
|
7 |
显示相机 |
单击以打开和关闭相机覆盖。 |
添加约束
约束摄影机视图的针脚区域,以确保相邻摄影机的扭曲具有相同的目的地,并且与线叠置重叠的所有点都映射到一条直线。您不能在full output模式,因此请确保您具有以下任一功能:
• 使用view查看器上方的按钮,或
• 如果你在main视图中,从Output View落下。
要添加约束:
| 1. | 找到两个相邻摄像机中发生的已知线性特征。示例包括门框,桌面,瓷砖等。 |
| 2. | 选择包含该功能的第一个视图,然后单击Add Point |
小费: 您也可以按住Ctrl/Cmd+Shift并在查看器中单击。
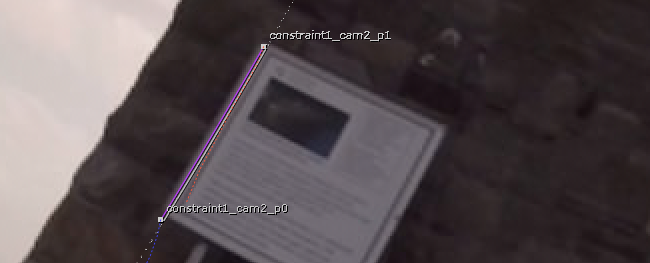
| 3. | 在查看器中单击约束开始和结束的位置。 |
|
|
|
|
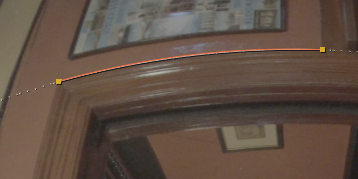
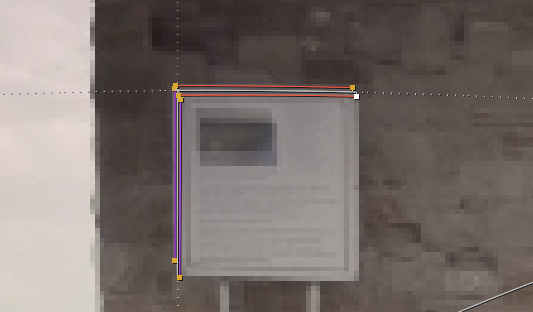
直线视图中的约束。 |
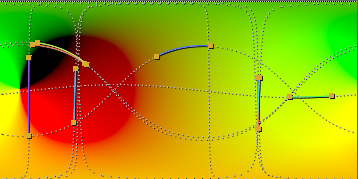
将相同的约束投影到latlong空间中。 |
| 4. | 选择包含要素的第二个视图,然后在查看器中单击约束开始和结束的位置。 |
如果您切换回main查看或full output,约束点在视图之间连接。
|
|
|
|
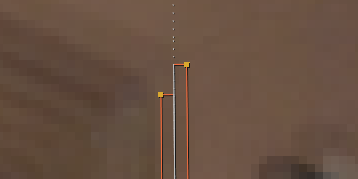
主视图中有两个视图约束。 |
约束的关闭。 |
| 5. | 在中选择约束Properties > Line Constraints > Lines表并设置Strength和帧范围控件。 |
• Strength -设置约束的强度偏差。增加约束的强度会迫使变形的输出收敛于约束。约束与C_CameraSolver中的用户匹配具有相似的权重。
• Start和End -设置约束影响的框架。如果约束功能移出镜头或被遮挡,则可以使用这些控件。
| 6. | 如果关联要素移动或改变形状,则为约束设置关键帧。看到动画参数有关动画关键帧的更多信息。您还可以使用C_GlobalWarp的Tracking控件。看到跟踪约束了解更多信息。 |
| 7. | 在要保留的区域中添加所需数量的约束。 |
确保在开始绘制一个约束之前已经完成绘制,否则将下一个点添加到先前的约束中。完成约束的最简单方法是单击Lines表。
如果要通过按住来向现有约束添加点Ctrl/Cmd+Shift并在查看器中单击,可以通过按N (“新约束”键盘快捷键),然后将所有后续点添加到新约束中。
小费: 如果您限制了太多区域,则全球扭曲可能很难产生明智的扭曲,因为固定了“一切”。
的Lines该表显示您添加的所有约束,包括Views他们在和Strength给他们的偏见。
注意: 您可以使用![]() 按钮,但请记住,隐藏的约束不会影响扭曲。
按钮,但请记住,隐藏的约束不会影响扭曲。
| 8. | 完成约束后,请单击Warp重新计算考虑了约束条件的整体变形。您可以随时添加更多约束,然后单击Warp再次整合新数据。 |
|
|
|
|
约束预变形。 |
产生的翘曲。 |

跟踪约束
受约束的区域可能会在镜头中移动,这意味着需要进行额外的关键帧工作以保持准确性。C_GlobalWarp的跟踪功能可以通过为您自动化一些工作来加快此过程。您还可以将轨道导出到各个C_Tracker节点,然后重新导入经过精炼的轨道以处理困难的序列。
| 1. | 正常添加约束。例如: |
看到添加约束了解更多信息。
| 2. | 选择要跟踪的约束Properties面板Line表。 |
| 3. | 设置Frame Range您要跟踪。各个约束的帧范围已更新。 |
| 4. | 请点击Track开始跟踪所选约束。 |
注意: 如果单击Track没有设置Frame Range, Enter tracking range显示对话框,允许您指定范围。
C_GlobalWarp跟踪帧范围内的选定点。
| 5. | 您可以在Properties下面板Settings > Tracking: |
• Step -设置跟踪关键帧之间的帧数。增加关键帧之间的步长可加快处理速度,但会影响准确性。
• Patch Size -设置约束点周围图像补丁的大小。增加音色大小可以改善轨道质量,但是较大的音色会增加处理时间。
• Error Threshold -设置约束轨道在终止之前可以容忍的图像更改阈值。降低此阈值可使跟踪对图像的变化更宽容,从而产生更长的轨道。
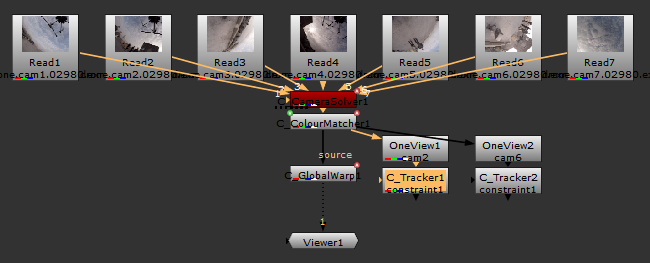
| 6. | 您可以将轨道导出到C_Tracker节点,以通过选择所需的约束并单击以进一步改善结果。 Export。 |
使用OneView节点按视图导出每个约束。例如,发生在cam2和cam6产生类似于图中所示的节点图。
| 7. | 双击C_Tracker节点以显示所需视图的跟踪关键帧。 |
看到追踪与稳定有关如何在CaraVR中使用C_Tracker的更多信息。
| 8. | 当您对C_Tracker的结果感到满意时,请打开C_GlobalWarp Properties面板上,选择导出的约束,然后单击Import。 |
改进的轨道是从C_Tracker导入的,然后您可以像平常一样扭曲图像。看到添加约束了解更多信息。
C_GlobalWarp输出
C_GlobalWarp的Cam Warp控制设置为Unwarped默认情况下,因此扭曲不会影响通过节点树传递的摄影机视图和latlong输出,而是将扭曲写入到stitch_map C_Stitcher可以用来影响最终针迹的图层。
如果要向下游传递摄像机变形,请设置Cam Warp控制Warped。然后,在应用扭曲的情况下渲染各个相机视图。
此外,C_GlobalWarp将从C_CameraSolver覆盖装备旋转元数据。查看器工具栏包括一个resetRotation按钮,可将装备旋转值重置为从元数据读取的原始值。然后,C_Stitcher以与C_CameraSolver元数据相同的方式处理元数据。看到一起拼接图像了解更多信息。