准备摄影机
创建装备的第一步是使用标准设备读取摄像机镜头Nuke读取节点并将其连接到C_CameraSolver节点。素材可以是每个文件具有单个或多个视图的静止图像或序列。
警告: 代表装备中摄像机的Read节点必须预先同步,因为CaraVR和Nuke不支持自动同步。
| 1. | 导航到Project Settings并设置full size format控制为所需的latlong格式,例如2K_LatLong 2048x1024。 |
注意: 您可以使用C_CameraSolver,C_ColourMatcher和C_Stitcher独立设置格式Properties面板。
| 2. | 使用“读取”节点读取所有素材。如果您使用多视角素材, Nuke请您先创建相关视图,然后再继续。 |
| 3. | 选择所有的Read节点,然后将C_CameraSolver节点添加到Node Graph并连接Viewer。 |
| 4. | 如果您的素材文件每个文件包含多个视图,请启用Stereo在Cameras标签,然后使用选择要解决的视图Input Views落下。 |
| 5. | 在节点属性中C_CameraSolver标签,点击Preset下拉菜单,然后选择所需的预设装备信息以进行加载: |
• Custom -允许您为装备指定任意数量的摄像机,并为摄像机中的每个摄像机提供自定义设置Cameras标签。
• PTGui -允许您指定在PTGui中创建的现有装备。看到进口钻机了解更多信息。
注意: CaraVR仅支持PTGui版本10 .pts文件或更早版本。如果您使用的是更高版本的PTGui,请确保使用PTGui 10 Project导出选项。
• Preset Rigs -从列表中选择所需的预设装备,以使用正确数量的摄像机创建相关装备。它们很少准确到足以“正常工作”的程度,但在某些情况下它们为解决提供了良好的基础。
如果您使用的是诺基亚OZO,Google Jump或Autopano钻机,则还需要导入.txt, .json , 要么.pano文件。从中选择所需的装备Preset下拉菜单,然后单击Setup Rig浏览到所需的文件。看到进口钻机了解更多信息。
注意: 如果您使用的是导入的或预设的装备,请确保以配置装备的相同顺序连接输入摄像机。如果C_CameraSolver产生的预览针迹在视图之间显示立即不匹配,请检查相机顺序是否正确。
小费: 如果要更改为备用装备,请从Preset下拉菜单,然后单击Setup Rig。
| 6. | 如果您使用预设或导入的装备,CaraVR会对装备中的摄像机做出明智的猜测。如果您使用的是Custom装备,启用Set global camera parameters并输入镜头参数。您在此处输入的信息越准确,从求解器获得良好结果的机会就越大。 |
注意: 当您设置一个Custom装置中,假设装置中的所有相机设置都是相同的,并在Cameras标签。如果您的装备包含其他相机,请单击Cameras标签,然后从表中选择一台相机来更改相机的镜头参数。
| 7. | 继续匹配和解决相机。 |
进口钻机
CaraVR允许您使用以下工具从PTGui,诺基亚OZO,Google Jump和Autopano导入装备.pts, .txt , .json和.pano文件格式。
注意: 如果您使用的是进口装备,请确保输入摄像机的连接顺序与该装备的配置顺序相同。如果C_CameraSolver产生的预览针迹在视图之间显示立即不匹配,请检查相机顺序是否正确。
导入装备:
| 1. | 使用“读取”节点读取所有素材。如果您使用多视角素材, Nuke请您先创建相关视图,然后再继续。 |
| 2. | 选择所有“读取”节点,然后将C_CameraSolver节点添加到“节点图”。 |
| 3. | 在节点属性中,单击Preset下拉菜单并选择PTGui, Nokia OZO , Google Jump , 要么Autopano然后点击 Setup Rig。 |
注意: CaraVR仅支持PTGui版本10 .pts文件或更早版本。如果您使用的是更高版本的PTGui,请确保使用PTGui 10 Project导出选项。
显示文件浏览器。
| 4. | 导航到所需的模板文件,然后单击Open导入钻机。 |
相机和镜头参数会从文件中的元数据自动填写。
| 5. | 继续匹配和解决相机。 |
关于Autopano导入的注意事项
当前的限制.pano进口如下:
• Autopano中的功能匹配不会转换为CaraVR中的匹配。
• 只能进口使用鱼眼镜头的钻机。
• Autopano中的鱼眼模型不同于CaraVR所实现的模型。与其他应用程序中的导入过程一样,这些值将被转换,因此失真不完全匹配。
导入背对背钻机
的Back to Back预设旨在解决视野大于180°的两机鱼眼钻机。要使用预设:
| 1. | 选择Back to Back来自Preset落下。 |
| 2. | 请点击Setup Rig。 |
显示装备设置对话框。
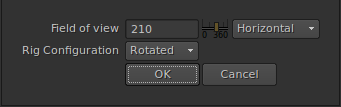
| 3. | 输入Field of view然后选择Horizontal, Vertical , 要么Diagonal取决于您的装备。 |
小费: 如果您不确定Field of view,估计然后调整C_CameraSolver的全局focal length因此,单击后OK。
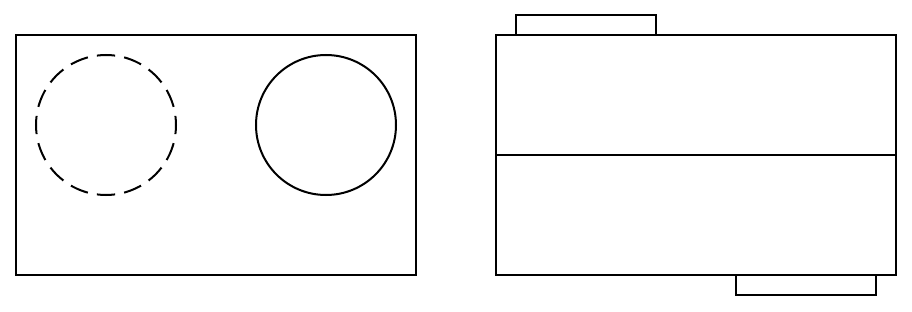
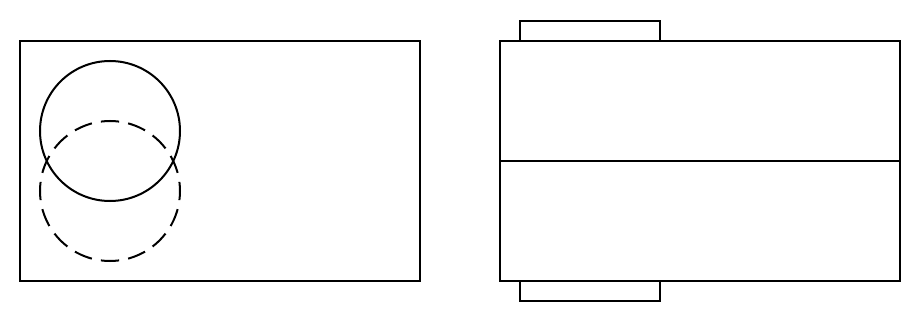
| 4. | 设置Rig Configuration考虑不同的镜头位置: |
• Rotated -镜头垂直对齐,但不水平对齐。
• Flipped -镜头水平对齐,但不垂直对齐。
| 5. | 请点击OK。 |
| 6. | 继续匹配和解决相机。 |
注意: 由于相机之间没有重叠,所以两个相机背靠背装置可能会导致C_Stitcher出现问题。看到改善背靠背钻机的重叠了解更多信息。