匹配和解决相机
设置装备后的下一步是设置装备的摄影机属性,在重叠的摄影机之间找到匹配项,并求解摄影机相对于彼此的位置。
| 1. | 的Analysis部分可让您更改装备的相机属性。默认情况下,CaraVR假定所有摄像机都具有相同的焦距,没有镜头失真和球形布局。 |
设置Focal Length 占:
• Known Focal Length -修正解算中现有的焦距。
• Optimize per Camera -计算装备中每个摄像机的焦距。
• Optimize Single -为装置中的所有摄像机计算单个优化焦距。
| 2. | 设置Lens Distortion, 如果需要的话。CaraVR假设No Lens Distortion默认情况下,但喜欢Focal Length,您可以考虑: |
• Known Distortion -解决了镜头变形问题。
• Optimize per Camera -计算装备中每个摄像机的镜头畸变。
• Optimize Single -为装置中的所有摄像机计算单个优化的镜头畸变。
| 3. | 设置 Camera Layout您打算使用: |
• Nodal Layout -所有摄像机均位于场景原点。例如,单个DSLR拍摄360剧照将使用此节点布局设置。
• Spherical Layout -钻机中的摄像机放置在一个球体上,球体的直径由Rig Size控制Cameras标签,默认为30厘米。
• Horizontal / Vertical / Planar Layout -根据选择,将钻机中的摄像机放置在一条直线或平面上。
• Free Layout -相机位置没有任何限制。
注意: 的Horizontal, Vertical , Planar和Free布局是实验性的。请联系support.foundry.com如果您有任何反馈要与Foundry分享。
小费: 设置Rig Size控制使用中的钻机的实际尺寸,可以输入其他设备的实际测量值Cameras控件,例如Focal Length。
同时使用多台摄像机拍摄的钻机通常具有球形结构,可让您更改Convergence在相机之间进行检查,以检查场景中不同深度的图像是否对齐。看到调整球形装配的收敛了解更多信息。
| 4. | CaraVR在序列的开头自动添加一个关键帧,以定义一组与场景中的固定点相对应的特征匹配,但是您可以通过以下方式手动添加关键帧: |
• 在查看器中进行擦洗,然后单击Add Key (![]() )在当前帧处添加关键帧,或者
)在当前帧处添加关键帧,或者
• 点击Key All在整个序列中添加关键帧Step间隔。
• 点击Import并选择要从中导入关键帧的节点。您可以从脚本中的C_CameraSolver,C_Stitcher或C_ColourMatcher的任何实例导入关键帧。
您添加的关键帧越多,过程花费的时间就越长,尽管您可能会获得更好的结果。
注意: C_Stitcher仅在指定的关键帧上计算光流摄像机的翘曲,而忽略不属于同一关键帧的上游动画。使用Import按钮可从C_CameraSolver复制所有关键帧。这样,在摄像机中添加的所有其他按摄像机手动关键帧Cameras标签也被复制。
小费: 如果要解决具有节点布局的设备,则可以单击Settings标签并启用Solve for animated cameras计算每个分析关键帧上相机参数的动画值。
此设置可以通过自动调整相机以补偿不同的景深来帮助消除单色360节点针迹中的重影。
但是请记住,如果相机位置固定,此设置可能会产生奇怪的结果。分析键上相机旋转的任何变化都可能导致背景场景移动。
| 5. | 请点击Match 比较重叠相机上的关键帧以获取共享功能。CaraVR仅在默认情况下重叠的摄像机中查找匹配项。 |
注意: Match同时计算装备中所有摄像机的功能匹配,因此无需在立体声设置中分别计算左右图像的功能匹配。看到拼接立体钻机了解更多信息。
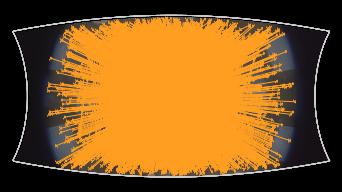
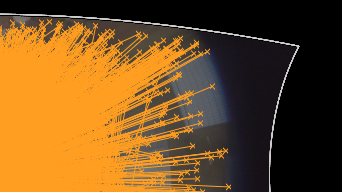
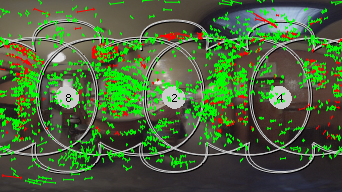
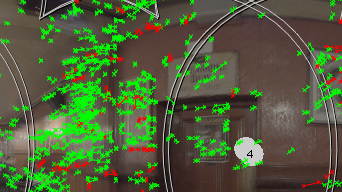
最初,摄像机的所有匹配功能在Viewer中彼此重叠。在您解决了装备上的摄像机或放大到查看器中(如第二幅图像所示)之前,各个匹配项是不可见的。
|
|
|
|
适用于不同查看器缩放级别的所有摄像机的功能匹配。 |
|
注意: 仅当播放头在关键帧上时才显示匹配项。
您可以使用“查看器”上方的“查看”按钮单步浏览装备上的摄像机以检查匹配项。如果将查看器切换为仅显示Alpha通道,则还可以检查应用于每个视图的默认蒙版。
|
|
|
|
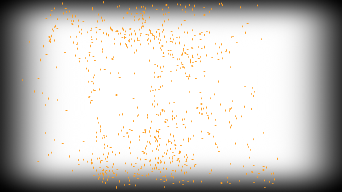
单个摄像机中的功能匹配。 |
默认的Alpha通道蒙版。 |

解决装置问题后,您还可以通过切换拉特朗空间中重叠摄像机之间的匹配项Cam Projection下拉至Latlong。
|
|
|
单个摄像机中的功能匹配 |
看到解决匹配和解决问题有关改善比赛结果的更多信息。
| 6. | 请点击Solve计算所选装备的几何形状,以定义每个摄影机相对于装备中其他摄影机的位置和方向,并以正确的顺序排列匹配的图像。 |
注意: 该解决方案可同时计算装备中所有摄像机的几何形状,因此无需在立体声设置中分别为左右图像计算它们的几何形状。看到拼接立体钻机了解更多信息。
求解后的预览图像将显示在查看器中,包括装备中摄像机的所有匹配点。
|
|
|
|
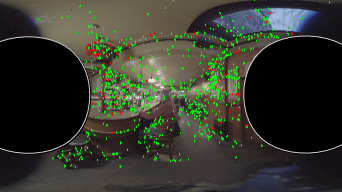
解决的相机和功能在不同的Viewer缩放级别上匹配。 |
|
| 7. | 切换到Camera模式( |
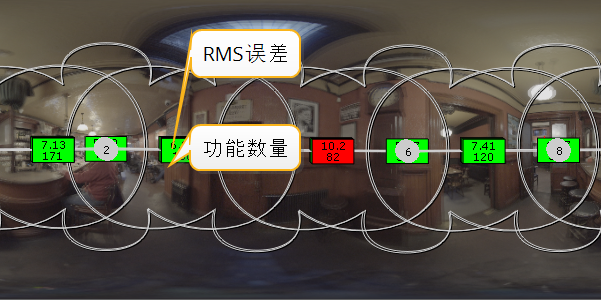
绿色覆盖表示低于RMS误差Error Threshold红色覆盖超出阈值的那些。
注意: 仅当播放头在关键帧上时才显示覆盖图。
看到解决匹配和解决问题有关如何优化匹配功能并解决的信息。
| 8. | 通过按下关闭覆盖Q在查看器上查看结果。 |
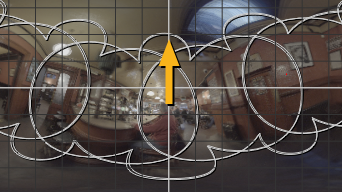
| 9. | 在继续将视图拼接在一起之前,已解决的相机可能需要做一些工作才能使地平线正确。CaraVR可能不会自动将图像放置在正确的方向。 |
CaraVR提供了两种调整地平线的方法: Transform控制Settings标签和查看器工具栏。
• Transform Controls -打开C_CameraSolver Properties面板,然后点击Settings标签。调整rotate x,y和z控件可将摄像机对齐为平线位于赤道或赤道下方。
• Viewer toolbar -启用Horizon工具,然后按住Ctrl/Cmd+Alt并在查看器中拖动以调整地平线。
|
|
|

注意: 您还可以通过选择Camera工具代替。
| 10. | 使用以下命令设置所需的输出分辨率Format下拉菜单(如果需要)。 |
小费: CaraVR将标签添加到Properties的面板Nuke的写入节点,可让您快速选择视图组,例如stereo和cams渲染预览或针迹时。您仍然可以使用views下拉菜单,但是View Presets可以使过程更快。
| 11. | 有关不正确的功能匹配或解决的相机的更多信息,请参阅解决匹配和解决问题拼接图像前的部分。 |
解决了绑定问题后,您可以导出到各种预设节点(请参见导出到预设节点有关更多信息),请跳至一起拼接图像将预览拼接在一起,或继续C_ColourMatcher拼接之前使用C_ColourMatcher。