导出到预设节点
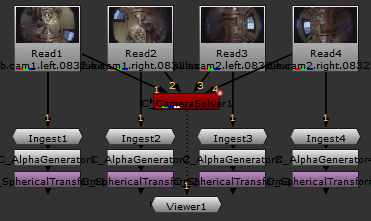
C_CameraSolver包含一个Export下拉菜单,它会自动添加预设脚本组件,使您可以快速创建常见VR任务的节点树。
从下拉列表中选择所需的操作,然后单击Create将脚本添加到节点图:
• Cameras -为装备中的每个摄像机创建附加到“轴”和“场景”的“摄像机”节点。
注意: “轴”节点包含您应用于装备的所有全局旋转。
|
|
|
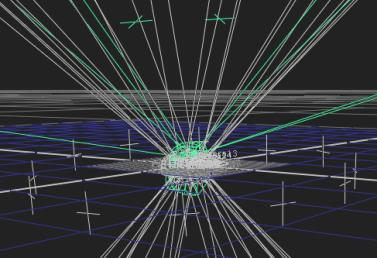
通过此选项,您可以检查装备中的每个摄像机的方向和视野Nuke的3D查看器。
如果您要解决鱼眼焦距过长的设备, Nuke显示警告消息。

这发生在Nuke无法自动将焦距转换为直线。在这种情况下,您可以使用Camera Ingest如下所述的选项,以不变的方式通过焦距,从而使您可以毫无问题地摄取极端的鱼眼镜头数据。
• Transforms (split) -创建单个C_SphericalTransform,其中包含装备中每个摄像机的旋转数据。单击查看器上方的视图以检查每个摄像机的旋转。

在里面Properties面板,打开Rotation Angles控件以查看每个视图的旋转信息。
注意: C_Stitcher可以将导出的转换中的摄像机缝合在一起,而无需在脚本中使用C_CameraSolver。看到一起拼接预先投影的图像了解更多信息。
• Transforms (separate) -使用装备中每个摄像机的OneView和C_SphericalTransform节点为每个视图创建单独的旋转数据。
此导出类似于Transforms (split),但视图被分成单独的流。
注意: C_Stitcher可以将导出的转换中的摄像机缝合在一起,而无需在脚本中使用C_CameraSolver。看到一起拼接预先投影的图像了解更多信息。
• Manual 2D Stitch -为每个视图创建一个包含C_SphericalTransform的RigWorkflow2D组,并将其传递到JoinViews和C_Blender节点中,以将视图重新组装为一个连贯的整体。
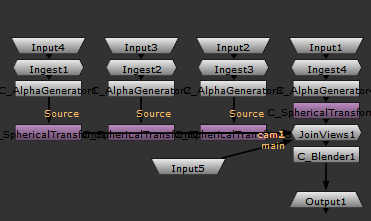
每个视图的AddMaskGenerator节点允许您调整用于将视图缝合在一起的蒙版,从而使您可以更好地控制匹配的摄像机对之间的覆盖范围和羽化。
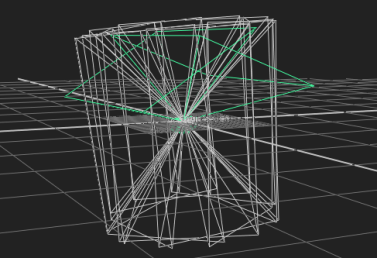
• Manual 3D Stitch -为每个视图创建一个包含C_SphericalTransform和Camera的RigWorkflow3D组,将其投影到Sphere上并通过RayRender渲染。
注意: 投影在Nuke的3D系统期望直线镜头,其固有地限于180°视野。因此,C_CameraSolver的手动3D工作流程不适用于使用鱼眼镜头的钻机。
• Ingest (joined) -为所有输入创建ShuffleView节点,允许您手动将输入分配给视图,然后将视图连接在一起。双击ShuffleView节点作为输入,以指定要使用哪个视图输出get和from控件。
• Ingest (separate) -为所有输入创建包含ShuffleView和OneView节点的摄取组,从而允许您将输入手动分配给视图。双击ShuffleView节点作为输入,以指定要使用哪个视图输出get和from控件。
此导出类似于Ingest (joined),但视图被分成单独的流。
• Contact Sheet -创建一个ContactSheet,其中包含所有已解决的视图以供查看。
• Camera Ingest -自动为每个视图创建“摄影机”节点,包括包含任何全局旋转的“轴”节点,并将图像和摄影机链接到C_CameraIngest节点。
此导出选项设置Cameras > Focal Length控制Default (pass through),使您可以通过不变的焦距来摄取极端的鱼眼镜头,而不会出现问题。
看到C_CameraIngest了解更多信息。