C_CameraIngest
C_CameraIngest从第三方应用程序获取手动解决的或预先跟踪的素材,并将CaraVR元数据添加到流中,以建立传递给拼接器的相机之间的关系模型,或作为C_CameraSolver进一步完善的基础。
您也可以将C_CameraIngest与从C_CameraSolver导出的摄像机一起使用,请参见导出到预设节点了解更多信息。与“摄影机”节点关联的“轴”节点包含应用于装备的任何全局旋转。
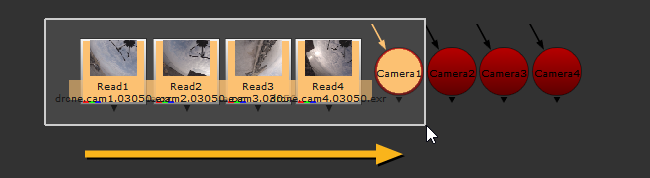
| 1. | 使用读取图像序列和相机数据Nuke的标准读取和相机节点。 |
| 2. | 选择所有“读取”节点和“摄像机”节点,以确保输入正确连接。 |
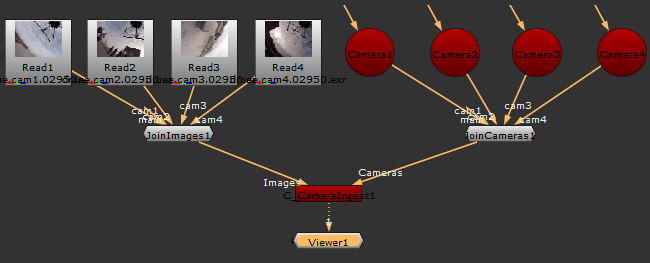
| 3. | 将C_CameraIngest添加到节点图。 |
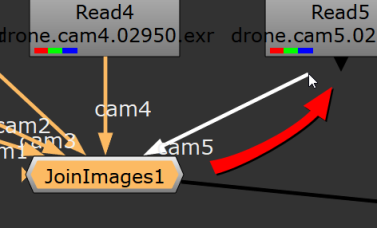
CaraVR使用具有修改名称,JoinImages和JoinCameras的JoinViews节点将所有图像和摄像机连接到C_CameraIngest节点。
注意: 如果以错误的顺序选择了节点,则可能需要手动重新连接节点输入。
| 4. | 将查看器连接到C_CameraIngest节点以显示主视图。 |
| 5. | 请点击Camera Views > Create 添加更多视图(如果需要)。 |
的Create Camera Views显示对话框。
| 6. | 输入您要创建的视图数。例如,如果脚本已经包含四个视图,则在对话框中输入七个将创建三个新视图。 |
注意: 输入少于当前视图数的数字将从脚本中删除多余的视图。
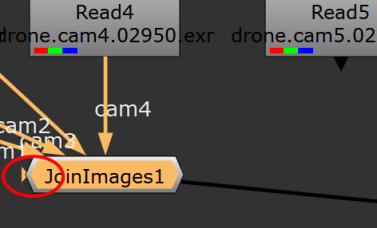
附加的图像和摄像机输入将添加到JoinImages和JoinCameras节点的左侧,将其拖放以正常连接输入。
|
|
|
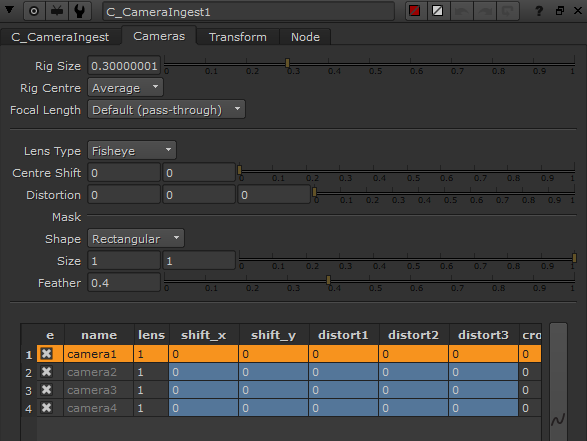
注意: 相机节点位于Nuke不包含镜头失真控制,因此C_CameraIngest在Properties面板上的Cameras标签,类似于C_CameraSolver控件中的标签。
| 7. | 设置Converge控制摄像机重叠的深度,使您可以将场景中的单个兴趣点聚焦。 |
注意: 的Converge控制对Nodal Layouts。
| 8. | 然后,您可以将结果传递给C_Stitcher或C_CameraSolver进行进一步优化。看到C_Stitcher和C_CameraSolver了解更多信息。 |
极端鱼眼镜头焦距
Nuke无法自动将极端的鱼眼镜头焦距转换为直线。如果尝试从C_CameraSolver导出某些鱼眼镜头相机,则会显示警告消息。

在这种情况下,您可以使用C_CameraIngest不变地通过焦距,从而可以毫无问题地摄取极端的鱼眼镜头数据。
注意: 的Camera Ingest选项中描述导出到预设节点从C_CameraSolver创建具有未转换的鱼眼焦距的Camera节点。
的Focal Length控制在Properties面板, Cameras标签可让您不变地通过焦距,而不是自动将其转换为直线。
Default (pass-through)是默认设置Focal Length控制。然后,您可以在Cameras标签并输入相机信息以改善效果。