解决匹配和解决问题
某些顺序在匹配和解决时不可避免地会引起问题。在解决装备时,有许多优化工作流程可协助CaraVR。
小费: CaraVR将标签添加到Properties的面板Nuke的写入节点,可让您快速选择视图组,例如stereo和cams渲染预览或针迹时。您仍然可以使用views下拉菜单,但是View Presets可以使过程更快。
拒绝和完善比赛
匹配并求解摄像机后,您会看到一些超出指定范围的功能Error Threshold公差,以红色标记。
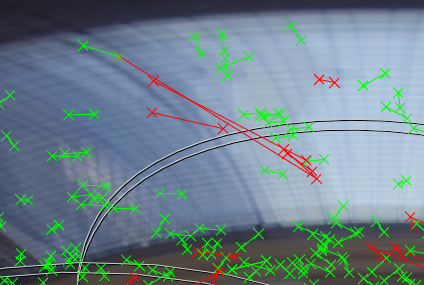
一般而言,匹配对应该在序列的给定区域中朝着相同方向发展,因此这是开始细化匹配的好地方。与相同区域中的其他对相比,匹配差的另一个好兆头是匹配要素之间的距离。
| 1. | 切换到Camera模式( |
注意: 该覆盖图仅显示在存在关键帧的帧上。
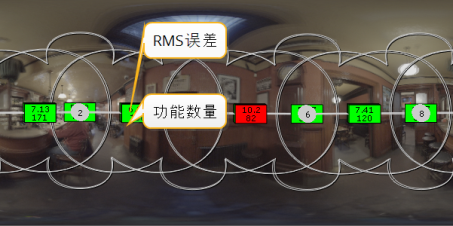
在此示例中,摄像机4和6重叠的匹配项记录的RMS误差为10.2,这是非常高的。
| 2. | 首先要尝试的是使用Analysis节点属性部分。 |
| 3. | 请点击Lens Distortion然后选择Optimise Single对装备中的所有摄像机都使用一个镜头模型。 |
| 4. | 请点击Refine。您可能会发现RMS误差降到了可接受的水平。 |
注意: 您可以通过设置进一步优化求解Lens Distortion至Optimse per Camera然后点击Refine再次为某些钻机。
| 5. | 切换回Matches模式( |
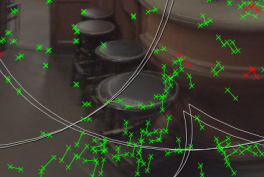
该示例显示CaraVR已自动拒绝的匹配项。与该地区的其他比赛相比,它们相距甚远,但是如果您降低了比赛范围,其他比赛也会变成红色。 Error Threshold控制。
| 6. | 要删除被拒绝的匹配项,您可以: |
• 点击Reject C_CameraSolver属性中的按钮,或
• 选择单个比赛并按Backspace要么Delete在键盘上。
| 7. | 清除被拒绝的匹配项后,点击Refine在C_CameraSolver属性中重新计算基于当前求解的求解。 |
您应该看到RMS误差以及功能部件数量的减少。
添加用户匹配
用户匹配项是手动放置的,而不是由C_CameraSolver自动检测到的,可用于改进自动匹配。您可以根据需要添加任意多个用户匹配项。
| 1. | 切换到Add Match模式( |
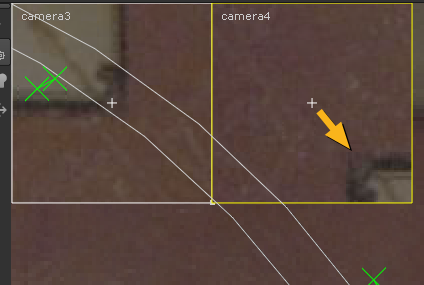
| 2. | 保持Ctrl/Cmd+Alt并单击查看器中多个摄像机中存在的功能以添加匹配标记( |
| 3. | 单击用户匹配项以显示功能所在的每个摄像机的缩放窗口。 |
小费: 您可能会发现平移查看器以移动自动功能可以更轻松地查看缩放窗口。
| 4. | 通过单击并拖动摄像机缩放窗口中的每个匹配实例来优化匹配位置。 |
为每个摄像机添加一个匹配标记。

| 5. | 添加所需数量的用户匹配项,然后单击Refine在C_CameraSolver属性中重新计算基于当前求解的求解。求解装备时,用户匹配项比自动匹配项具有更多的权重,因此,添加的匹配项越准确,获得好的解决方案的机会就越大。 |
小费: 您可以调整Settings > User Matches Weight控件,指示CaraVR在优化解决方案时为用户提供或多或少的“权重”匹配。如果您没有添加太多用户匹配项,则可以考虑减少权重,以便解决方案更多地取决于自动生成的匹配项。
| 6. | 切换回Camera模式( |
调整球形装配的收敛
如果您使用的是球形摄像头布局,则可以调整Converge控件可更改相机重叠的深度,使您可以将场景中的特定区域聚焦。您可以通过调整滑块直到需要的深度消失重影,使用会聚来确定物体与相机的距离。
C_CameraSolver中的收敛用于测试求解的质量,最终收敛使用C_Stitcher中的控件进行设置。看到在球形装备中设置收敛点了解更多信息。
注意: 收敛对节点设备没有任何影响,因为所有摄像机共享相同的原点。
第一步是使用Rig Size控制Cameras标签。根据解算的质量,这会将装备的3D表示标准化为接近实际单位。的Converge然后,控件定义预览针迹会合的深度,从而使镜头的不同区域成为焦点。
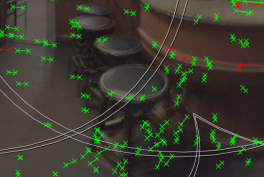
该示例使用默认值显示收敛深度Rig Size的设置0.3 (或30厘米)。的Converge控制默认为10,考虑到前台的凳子时有点高。
|
|
|
|
默认装备设置显示重叠摄像机之间的偏移。 |
|

减少Converge价值到周围1.6米使凳子变得更加清晰。您还可以看到匹配的要素对相互重叠。
|
|
|
|
减小会聚深度可使偏移很好地对齐。 |
|

您可以通过单击删除所有以红色显示的功能匹配Reject在节点属性中,然后Refine解决。