解决相机
当您对所跟踪的功能满意时,可以解决摄像机的位置。C_Tracker使用跟踪信息来计算摄像机位置,该位置用于稳定或移动火柴。
| 1. | 在C_Tracker中Properties面板上,点击Solve Using下拉菜单,然后选择要使用的跟踪数据的类型。如果您创建了自动轨道,然后还添加了一些手动轨道,请选择Combined。 |
| 2. | 请点击Solve。 |
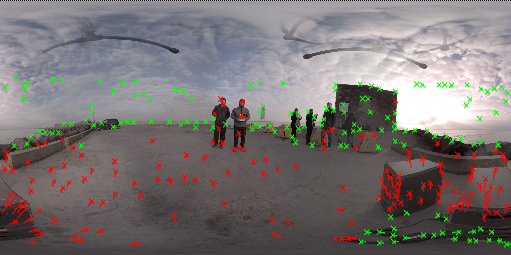
求解完成后,查看器将显示应用了求解数据的跟踪特征。绿色特征表示良好的求解数据,红色特征表示较差的求解数据。
的Solve Error是解决方案总体质量的良好指标。如果RMS(均方根)误差非常高,请考虑完善您的跟踪数据或添加一些用户跟踪并重新求解摄像机。看到自动跟踪疑难解答和手动追踪了解更多信息。
| 3. | 如果解决方案拒绝了太多轨道,请尝试增加Error Threshold 或使用Solve控制Settings标签。看到解决问题了解更多信息。 |
对求解感到满意时,可以使用变换数据进行稳定或匹配移动。看到使用C_Tracker稳定了解更多信息。