手动轨道故障排除
即使使用手动定位的轨道,某些序列也不可避免地会引起问题。您可以执行许多预跟踪检查来协助C_Tracker:
• 在放置跟踪锚之前,请先按顺序播放。
• 寻找在整个序列的大部分时间内保持一致的功能。
• 尽可能避免使用被遮挡的功能-请参阅处理遮挡。
小费: 您还可以添加自动跟踪以进一步改善效果。看到自动追踪了解更多信息。
要对手动曲目进行故障排除:
| 1. | 首先,通过点击交通灯查看器工具打开用颜色编码的错误指示器 |
每个关键帧以从绿色(良好匹配)到红色(不良匹配)的滑动标度着色。
红色关键帧并不一定意味着跟踪结果很差,只是C_Tracker无法可靠地将模式从一个关键帧匹配到下一个关键帧。
| 2. | 在示例中,将跟踪锚移动到不良帧的第一个,恰好位于图像的中心。 |
| 3. | 使用缩放窗口,将锚点拖动到抓取的图案的正确位置。 |
| 4. | 将播放头前进到下一个较差的关键帧,然后重复进行直到音轨完成。 |
当您对跟踪特征的数量和分布感到满意时,您可以对摄像机进行求解,然后将结果用于稳定或匹配移动。看到解决相机了解更多信息。
处理遮挡
C_Tracker的偏移功能使您可以使用另一个要素的相对位置来跟踪模糊的要素,前提是两点之间的距离保持恒定。
| 1. | 正常跟踪模式,直到遮挡导致Tracker失败。 |
缩放窗口有助于识别故障点。
| 2. | 播放序列以识别可能的偏移点-与原始图案抓取保持等距的图案。 |
| 3. | 按住Ctrl/Cmd并将跟踪锚点拖动到偏移位置。 |
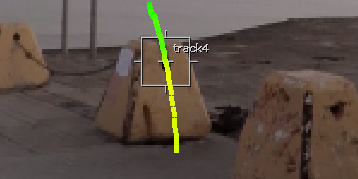
偏移量记录在“轨迹”列表中,并在查看器中以黄色突出显示。
| 4. | 单击“后退(Z)”或“前进(V)”按钮,继续正常进行跟踪。 |
跟踪器将两个轨道合并为一个连续的轨道。
| 5. | 使用清除后退和前进按钮 |
注意: 您可以通过以下方式重置跟踪锚点模式和搜索区域: ![]() 。
。