完善结果
要改善结果:
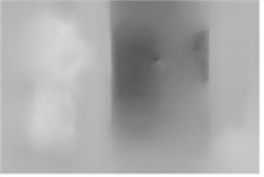
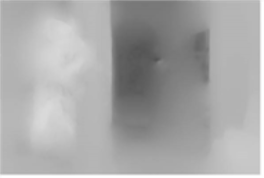
| 1. | 调整DepthDetail改变用于计算深度图的图像的分辨率。默认值0.5等于图像分辨率的一半。较低的值可加快处理速度并提供更平滑的结果。值越高,细节越细,但处理时间也会增加。 |
|
|
|
| Depth Detail = 0.15 | Depth Detail = 0.85 |
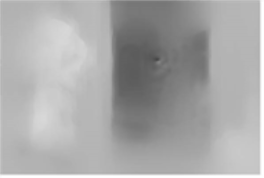
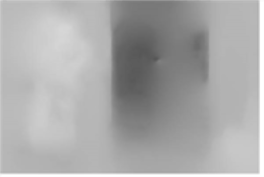
| 2. | 如果发现深度图在平面图像区域中有噪点,请尝试增加Noise的价值Depth Generation参数组。这设置了DepthGenerator在计算深度图时在输入素材中应忽略的噪声量。值越高,深度图越平滑。 |
|
|
|
| Noise = 0 | Noise = 0.15 |

| 3. | 如果您认为深度图应该仍然更平滑,则可以增加Smoothness。不会影响深度计算,而是对结果施加智能模糊。 |
高平滑度会丢失很多局部细节,但不太可能产生嘈杂的深度值。即使生成的深度图参差不齐,低平滑度也会集中在细节匹配上。
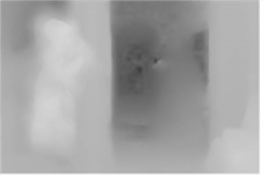
| 4. | 的Strength参数定义帧之间像素匹配的强度。您通常可以将其保留为默认值。但是,如果深度图看起来不适合图像的某些边缘,则可以增加Strength强制错过细节的比赛。您也可以减少Strength平滑深度图,但通常最好将其设置为较高的值,以确保算法与图像匹配并正确计算深度。 |
|
|
|
| Strength = 0.5 | Strength = 1.5 |
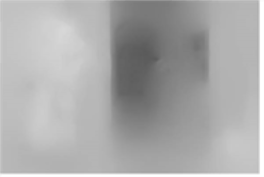
| 5. | 如果您对深度图中的对象边界不满意,请调整Sharpness。使用较高的值在对象之间产生明显的边界,或使用较低的值使边界平滑。 |
|
|
|
| Sharpness = 0.05 | Sharpness = 0.95 |

| 6. | 如有必要,使用Near Clip Plane和Far Clip Plane设置深度图中允许的最小值和最大值。超出此范围的所有深度值都会被裁剪为这些值。 |
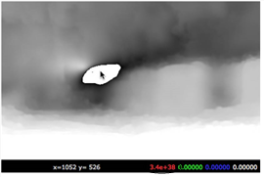
| 7. | 要查看是否存在任何深度计算不明确的区域,请检查Mark Bad Regions。 |
在深度图中,任何歧义区域都标记为非常大的值。如果CameraTracker由于某些相机运动而无法使用相机数据计算所有像素的深度,则可能会出现此类区域。
|
|
| Mark Bad Regions 已启用。 |
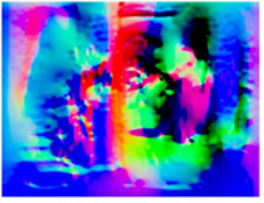
| 8. | 设置完参数使您对深度图满意后,查看法线通过(如果您决定更早生成一个)。从深度计算法线,法线方向由像素之间的深度变化定义。法线通过可能会产生噪音,因为深度的小变化会导致法线的大变化。要通过使用较低分辨率的深度图计算法线来平滑法线图,请减小Normal Detail。这样可以整合更宽像素范围内的深度变化,从而减少法线通过中的噪声。 |
默认值0.25导致法线通过以四分之一分辨率进行计算。
|
|
|
| Normal Detail = 0.2 | Normal Detail = 0.8 |
| 9. | 继续使用结果。 |