検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
C_CameraIngest
C_CameraIngestは、サードパーティアプリケーションから手動で解決または事前に追跡された映像を取得し、CaraVRメタデータをストリームに追加して、カメラ間の関係のモデルを構築し、スティッチャーに渡すか、C_CameraSolverをさらに改良するための基礎として使用します。
C_CameraSolverからエクスポートされたカメラでC_CameraIngestを使用することもできます。 プリセットノードへのエクスポート詳細については。カメラノードに関連付けられた軸ノードには、リグに適用されるグローバル回転が含まれます。
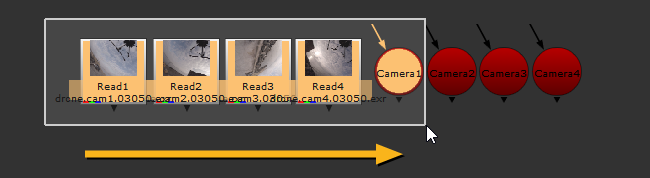
| 1. | を使用して画像シーケンスとカメラデータを読み込みますNukeの標準の読み取りノードとカメラノード。 |
| 2. | 入力が正しく接続されていることを確認するために、すべての読み取りノードとカメラノードを選択します。 |
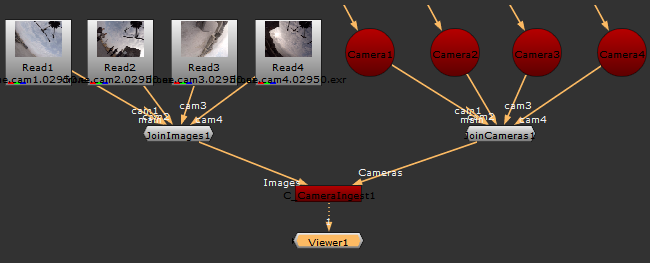
| 3. | C_CameraIngestをノードグラフに追加します。 |
CaraVRは、名前、JoinImages、JoinCamerasを変更したJoinViewsノードを使用して、すべての画像とカメラをC_CameraIngestノードに接続します。
注意: 間違った順序でノードを選択した場合、ノード入力を手動で再接続する必要がある場合があります。
| 4. | ビューアーをC_CameraIngestノードに接続して、メインビューを表示します。 |
| 5. | クリックCamera Views > Create 必要に応じてビューを追加します。 |
のCreate Camera Viewsダイアログが表示されます。
| 6. | 作成するビューの数を入力します。たとえば、スクリプトにすでに4つのビューが含まれている場合、ダイアログに7と入力すると、3つの新しいビューが作成されます。 |
注意: 現在のビュー数より少ない数を入力すると、スクリプトから余分なビューが削除されます。
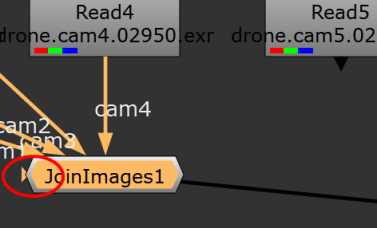
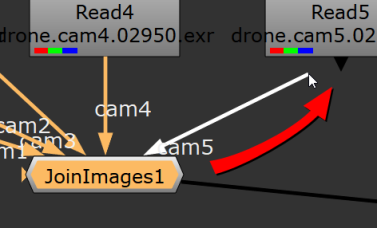
追加の画像およびカメラ入力がJoinImagesおよびJoinCamerasノードの左側に追加され、それらを通常どおりにドラッグアンドドロップして入力を接続します。
|
|
|
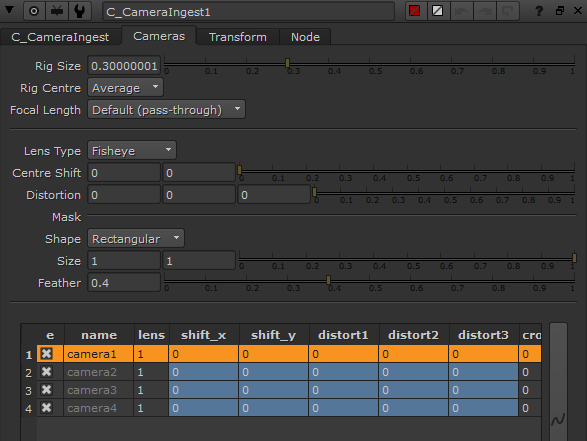
注意: カメラノードNukeレンズの歪みコントロールを含めないでください。そのため、C_CameraIngestにはカメラテーブルが含まれます。 Properties上のパネルCameras C_CameraSolverコントロールにあるものと同様のタブ。
| 7. | をセットするConvergeカメラが重なる深さを制御し、シーン内の単一の関心ポイントに焦点を合わせることができます。 |
注意: のConverge制御は影響しませんNodal Layouts。
| 8. | その後、結果をC_StitcherまたはC_CameraSolverに渡して、さらに調整することができます。見るC_StitcherそしてC_CameraSolver詳細については。 |
極端な魚眼焦点距離
Nuke極端な魚眼焦点距離を直線に自動的に変換することはできません。C_CameraSolverからいくつかの魚眼カメラをエクスポートしようとすると、警告メッセージが表示されます。

この場合、C_CameraIngestを使用して焦点距離を変更せずに通過させることができ、極端な魚眼カメラデータを問題なく取り込むことができます。
注意: のCamera Ingestで説明されているオプションプリセットノードへのエクスポート C_CameraSolverから未変換の魚眼焦点距離を持つカメラノードを作成します。
のFocal Lengthの制御Propertiesパネル、 Camerasタブを使用すると、焦点距離を直線に自動的に変換するのではなく、変更せずに通過できます。
Default (pass-through)のデフォルト設定ですFocal Lengthコントロール。次に、上のマトリックスでカメラを選択できますCamerasタブを開き、カメラ情報を入力して結果を改善します。
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。