検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
C_CameraSolver
C_CameraSolverを使用すると、リグを調整して、カメラ間の関係のモデルを構築し、ステッチのプレビューを作成できます。C_CameraSolverには、6カメラのFreedom360や14カメラのH3PRO14など、解析の開始点として使用できるリグプリセットのリストが含まれています。CaraVRは、手動で調整するカスタムリグと、PTGuiおよびAutopanoを使用して作成されたリグのインポート機能もサポートします。 .ptsそして.panoフォーマット。
注意: CaraVRはPTGuiバージョン10のみをサポートします.ptsファイル、またはそれ以前。PTGuiの新しいバージョンを使用している場合は、必ず使用してくださいPTGui 10 Projectエクスポートオプション。
|
|
|
|
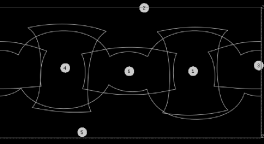
Freedom360リグ |
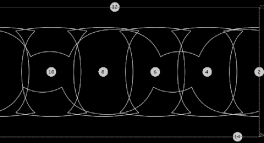
H3PRO14リグ |
見るカメラリグの準備詳細については。
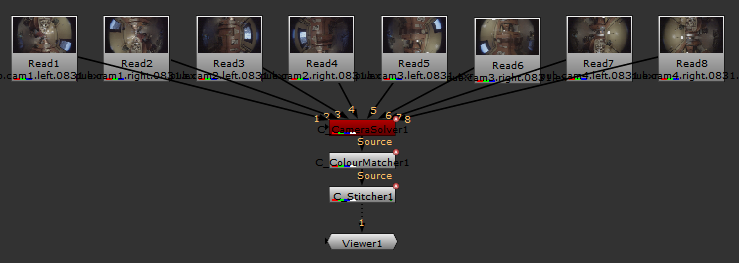
C_CameraSolverは、リグと元のソース画像に関するメタデータを、後のノードがアクセスするために下流にフィードします。最も重要なのは、C_StitcherとC_ColourMatcherです。これらのノードは両方とも、タスクを実行するためにこの情報を必要とするため、C_CameraSolverはすべてのステッチスクリプトの上部にあるエンジンツールになります。
C_CameraSolverは、リグのノード表現と球面表現の両方を構築できます。多くの場合、球状リグは物理的に正確です。ソルバーは、必要に応じてリグレイアウトとレンズパラメーターをゼロから推定でき、レイアウトを微調整して手動で構成するための多くのツールを提供します。
見るカメラのマッチングと解決詳細については。
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。