検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
自動追跡のトラブルシューティング
追跡がどれほど高度になろうとも、シーケンスによっては必然的に問題を引き起こす可能性があります。には多くのコントロールがありますSettingsより良い結果を達成するのに役立つタブ。これらの設定を調整し、結果を改善するために再追跡してみてください。
ヒント: ユーザートラックを追加して、結果をさらに改善することもできます。見る手動追跡詳細については。
機能設定
これらのコントロールは、C_Trackerがフレームごとに分析する自動検出機能の数と位置を決定します。有効にするPreview Featuresコントロールを変更すると、画像全体の機能の配置にどのように影響するかを確認できます。
注意: 追跡には時間がかかりますPreview Features有効になっているため、再追跡する前に無効にすることを忘れないでください。
• Number of Features -各フレームで追跡する機能の数を設定します。
ほとんどの場合、デフォルトの300で十分ですが、難しいシーケンスでは、より大きな数を使用することを検討できます。
|
|
|
|
低いNumber of Features。 |
高いNumber of Features。 |

ヒント: 小切手enforceいくつかのトラックを停止して新しいトラックをシードすることを意味する場合でも、トラックの数を一定に保つTrack forwards and backwards有効になっています。
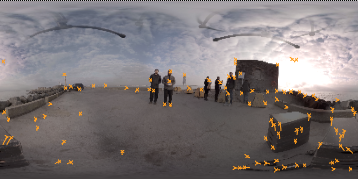
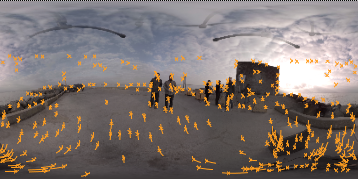
• Feature Spread -画像上に特徴の広がりを設定します。
値を大きくすると、ローカル領域で明確なポイントが選択され、値を小さくすると、コントラストの高い領域でより顕著なポイントが選択されます。
|
|
|
|
低いFeature Spread。 |
高いFeature Spread。 |


• Feature Separation -相互に関連する機能の分布を設定します。
フィーチャの分離を強制し、均等な距離で画像上にフィーチャを均等に広げるには、高いフィーチャ分離値を入力します。
|
|
|
|
低いFeature Separation。 |
高いFeature Separation。 |


ヒント: 小切手enforceたとえそれが全体的なトラックの数が少なくても
小切手Refine Feature Locations検出されたフィーチャをローカルコーナーにロックします。これをアクティブにすると、C_Trackerはフッテージ内の最も近いコーナーポイントを見つけて、それにフィーチャをロックします。
トラッキング設定
次のコントロールを使用して機能トラックのセットを改善し、再追跡して、良い解決を得る可能性を改善できます。
• Track forwards and backwards -この制御を有効にすると、安定化の結果を改善できますが、トラックの生成に時間がかかります。
• Patch Size -シーケンスを分析するときにC_Trackerが探すパターンのサイズを設定します。
この値を小さくすると、パターンをより厳密に一致させることができますが、値を大きくすると、より安定したトラックが生成されます。
• Minimum Length -最小許容トラック長のしきい値を設定します。この量のフレームで関連付けられた機能に固執できないトラックは拒否されます。
長時間の遅いカメラの動きでは、ショットで生成された長いトラックから解決するのが最善です。短いトラックが多数ある場合、計算されたカメラでノイズが発生する可能性があります。解決する前に短いトラックを削除してみてください。
|
|
|
|
低いMinimum Length。 |
高いMinimum Length。 |


• Track Error Threshold -トラックに沿って変化するC_Trackerの許容値は、このコントロールによって決定されます。
このしきい値を大きくすると、追跡が画像の変化に対してより耐性になり、潜在的に長い追跡が生成されます。
|
|
|
|
低いTrack Error Threshold。 |
高いTrack Error Threshold。 |

注意: のTrack Error Thresholdデフォルトでは、ユーザートラックにも適用されます。ユーザートラックがこのしきい値の対象にならないようにするには、無効にしますapply to user tracksコントロール。
• Track Smoothness -スムーズトラック生成のしきい値を設定します。この値を調整すると、複雑なシーケンスでトラックの品質が低下するのを防ぐのに役立ちます。
滑らかさの値を大きくすると、時間の経過とともに失敗するトラックが削除されます。
• Track Consistency -C_Trackerがフィーチャトラックを破棄して別の場所に再シードする前に、フィーチャトラックがどれだけ矛盾するかについてのしきい値を設定します。
値を大きくすると、矛盾が少なくなります。
追跡対象の機能の数と分布に満足したら、カメラを解決し、その結果を使用して安定化または一致移動することができます。見るカメラを解く詳細については。
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。