検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
カメラを解く
追跡した機能に満足したら、カメラの位置を解決できます。C_Trackerは追跡情報を使用してカメラ位置を計算します。これは、安定化または一致移動に使用されます。
| 1. | C_TrackerでPropertiesパネルで、 Solve Usingプルダウンで使用するトラッキングデータのタイプを選択します。自動トラックを作成してから手動トラックも追加した場合は、選択しますCombined。 |
| 2. | クリックSolve。 |
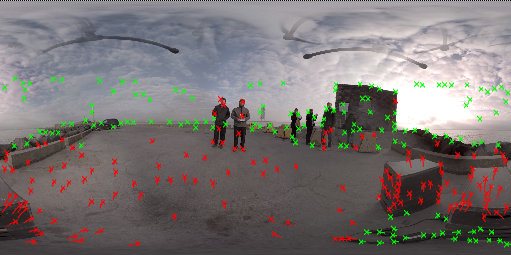
解析が完了すると、ビューアに解析データが適用された追跡対象フィーチャが表示されます。緑の特徴は良好な解析データを表し、赤の特徴は不良な解析データを表します。
のSolve Errorソルバの全体的な品質の良い指標です。RMS(二乗平均平方根)エラーが非常に大きい場合は、トラッキングデータを調整するか、ユーザートラックを追加してカメラを再度解決することを検討してください。見る自動追跡のトラブルシューティングそして手動追跡詳細については。
| 3. | ソルバーによって拒否されたトラックが多すぎる場合は、 Error Threshold または、 Solve上のコントロールSettingsタブ。見るトラブルシューティング詳細については。 |
解決に満足したら、変換データを使用して安定化または一致移動を行うことができます。見るC_Trackerを使用した安定化詳細については。
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。