C_DisparityGeneratorを使用する
2つのビュー間の視差マップを生成するには:
| 1. | C_Stitcherの後にC_DisparityGeneratorノードを追加します。 |
| 2. | 使用するビューを選択しますLeft ViewそしてRight View視差マップを作成するとき。 |
| 3. | C_DisparityGeneratorはデフォルトで直線ベクトルを作成しますが、生成することを選択できますLatlongを使用するベクトルProjection落ちる。 |
Latlongベクトルは計算に時間がかかりますが、動きの推定に使用できる球面連続性のために画像の側面を横切ってワープできます。
設定ProjectionにLatlongを使用して、画像の左端と右端でのベクトルの動作を選択できますVectorspaceコントロール:
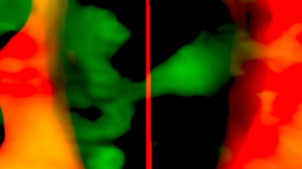
• Default (wrapped) -ベクトルは、左から右、右から左に単純にラップされます。この方法は、エッジで不連続を生成する可能性がありますが、通常はNuke IDistortなどのノード。
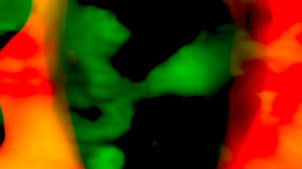
• Continuous -このメソッドは、C_NewViewなどのCaraVRノードで使用するために、より適切な結果を生成するために、左端と右端のベクトルを計算します。
注意: C_DisparityToDepth、C_NewView、C_StereoColourMatcher、およびC_VerticalAlignerは含まれていませんNukeX。詳細については、CaraVRを参照してくださいオンラインヘルプ。
|
|
|
|
Default (wrapped)明確な不連続性を示しています |
Continuous不連続性を排除しますが、 |
| 4. | 視差マップを生成するときに無視したい領域が画像にある場合は、 Mask入力またはアルファのSource入力。C_DisparityGeneratorコントロールで、設定しますMaskマスクとして使用するコンポーネントに。 |
注意: マスクは両方のビューに存在する必要があり、C_DisparityGeneratorはアルファ値を処理します1前景として、にぼかし0画像データではなく、近くの視差を使用してオブジェクトの境界を再作成する値。RotoまたはRotoPaintを使用してマスクを作成する場合、フェザーコントロールを使用して計算を拡張できます。たとえば、視差マップは、バイナリマスクを使用して深度エッジでより鮮明な移行を行うことができますが、マスクにぼかしを適用すると、結果の画像を滑らかにすることができます。
| 5. | ビューアーをC_DisparityGeneratorノードに接続し、ビューアーから視差チャンネルを選択して表示します。 channelsビューアーの上にドロップダウン。 |
C_DisparityGeneratorは、視差マップを計算し、視差チャネルに保存します。
ヒント: 視差マップの読み取り深度は、RGBでは扱いにくい場合があります。深さを読みやすくする方法はいくつかありますが、最も簡単な方法は次のとおりです。
1.ビューアーチャネルコントロールをdisparityLそしてそのRチャンネル内のレイヤー。
2.ビューアー情報バーを使用して、ポインターを画像の周囲に移動して、最大の正または負の赤の値を見つけます。
3.設定するgainへのフィールド+/-1赤の値で割った値。例えば、 1/20正の値または-1/20負の値の場合。
4.調整しますgainそしてgammaコントラストのエッジと領域を表示するコントロール。
画像の暗い領域はカメラから遠く、明るい領域は近くなる傾向があります。負のゲインを使用すると、明るい色と暗い色が反転します。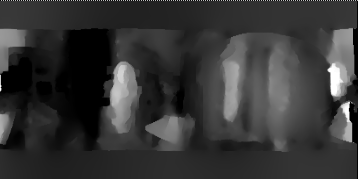
ベクトルを生成したら、それらを書き出すことができます.exrまたは.sxrソース画像とベクターを組み合わせて、後で時間を節約します。
| 6. | 次に、ベクトルデータをC_NewViewまたはC_StereoColourMatcherに渡して、ステレオペア間で補正と色を複製できます。 |
注意: C_DisparityToDepth、C_NewView、C_StereoColourMatcher、およびC_VerticalAlignerは含まれていませんNukeX。詳細については、CaraVRを参照してくださいオンラインヘルプ。
他を使用して画像をワープすることもできますNukeなどのノードIDistortまたはSTMap。
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
Email Docs Teamフィードバックをお寄せいただきありがとうございます。
