카메라 리그 준비
리그를 만드는 첫 번째 단계는 표준을 사용하여 카메라 영상을 읽는 것입니다 Nuke 노드를 읽고 C_CameraSolver 노드에 연결하십시오. 푸티지는 파일 당 단일 또는 다중 뷰를 가진 스틸 또는 시퀀스 일 수 있습니다.
경고: 장비의 카메라를 나타내는 읽기 노드는 CaraVR과 Nuke 자동 동기화를 지원하지 않습니다.
| 1. | 로 이동 Project Settings 그리고 설정 full size format 필요한 latlong 형식으로 제어 2K_LatLong 2048x1024. |
노트 : C_CameraSolver, C_ColourMatcher 및 C_Stitcher를 사용하여 형식을 독립적으로 설정할 수 있습니다 Properties 패널.
| 2. | 읽기 노드를 사용하여 모든 푸티지를 읽습니다. 다시 점 푸티지를 사용하는 경우 Nuke 계속하기 전에 관련보기를 작성하도록 요청합니다. |
| 3. | 모든 읽기 노드를 선택한 다음 C_CameraSolver 노드를 노드 그래프에 추가하고 뷰어를 연결하십시오. |
| 4. | 푸티 지에 파일 당 여러 뷰가 포함 된 경우 Stereo 에 Cameras 탭을 사용하여 해결하려는보기를 선택하십시오. Input Views 쓰러지 다. |
| 5. | 노드 속성에서 C_CameraSolver 탭에서 Preset 드롭 다운에서 필요한 사전 설정 리그 정보를 선택하십시오. |
• Custom -리그에서 사용할 수있는 각 카메라에 대한 사용자 정의 설정을 사용하여 리그의 카메라 수를 지정할 수 있습니다 Cameras 탭.
• PTGui -PTGui에서 생성 된 기존 리그를 지정할 수 있습니다. 보다 리그 가져 오기 자세한 내용은.
노트 : CaraVR은 PTGui 버전 10 만 지원합니다 .pts 파일 또는 이전. 최신 버전의 PTGui를 사용하는 경우 PTGui 10 Project 수출 옵션.
• Preset Rigs -목록에서 필요한 사전 설정 리그를 선택하여 올바른 수의 카메라로 관련 리그를 만듭니다. 이것들은 '정확히 작동'하기에 충분히 정확하지는 않지만 경우에 따라 해결을위한 좋은 기초를 제공합니다.
Nokia OZO, Google Jump 또는 Autopano 리그를 사용하는 경우 .txt, .json 또는 .pano 파일. 에서 필요한 리그를 선택하십시오 Preset 드롭 다운을 클릭 한 다음 Setup Rig 필요한 파일을 찾습니다. 보다 리그 가져 오기 자세한 내용은.
노트 : 가져 오기 또는 사전 설정 리그를 사용하는 경우 입력 카메라가 리그가 구성된 순서와 동일한 순서로 연결되어 있는지 확인하십시오. C_CameraSolver에서 생성 된 미리보기 스티치가 뷰간에 즉각적인 불일치를 표시하면 카메라 순서가 올바른지 확인하십시오.
팁: 대체 리그로 변경하려면 장비에서 리그를 선택하십시오. Preset 드롭 다운을 클릭 한 다음 Setup Rig.
| 6. | 사전 설정 또는 가져온 장비를 사용하는 경우 CaraVR은 장비의 카메라에 대해 정확한 정보를 제공합니다. 당신이 사용하는 경우 Custom 장비, 가능 Set global camera parameters 렌즈 매개 변수를 입력하십시오. 여기에 정확한 정보를 입력할수록 솔버에서 좋은 결과를 얻을 수있는 가능성이 높아집니다. |
노트 : 당신이 설정할 때 Custom 리그의 모든 카메라 설정은 동일하다고 가정하고 Cameras 탭. 리그에 다른 카메라가 포함 된 경우 Cameras 탭을 클릭 한 다음 표에서 카메라를 선택하여 카메라의 렌즈 매개 변수를 변경하십시오.
| 7. | 로 진행 카메라 매칭 및 해결. |
리그 가져 오기
CaraVR을 사용하면 PTGui, Nokia OZO, Google Jump 및 Autopano에서 리그를 가져올 수 있습니다. .pts, .txt , .json , .pano 파일 형식.
노트 : 가져온 리그를 사용하는 경우 입력 카메라가 리그가 구성된 순서와 동일한 순서로 연결되어 있는지 확인하십시오. C_CameraSolver에서 생성 된 미리보기 스티치가 뷰간에 즉각적인 불일치를 표시하면 카메라 순서가 올바른지 확인하십시오.
리그를 가져 오려면 :
| 1. | 읽기 노드를 사용하여 모든 푸티지를 읽습니다. 다시 점 푸티지를 사용하는 경우 Nuke 계속하기 전에 관련보기를 작성하도록 요청합니다. |
| 2. | 모든 읽기 노드를 선택한 다음 C_CameraSolver 노드를 노드 그래프에 추가하십시오. |
| 3. | 노드 속성에서 Preset 드롭 다운 및 선택 PTGui, Nokia OZO , Google Jump 또는 Autopano 클릭 Setup Rig. |
노트 : CaraVR은 PTGui 버전 10 만 지원합니다 .pts 파일 또는 이전. 최신 버전의 PTGui를 사용하는 경우 PTGui 10 Project 수출 옵션.
파일 브라우저가 표시됩니다.
| 4. | 필요한 템플릿 파일로 이동 한 후 Open 리그를 가져옵니다. |
카메라 및 렌즈 매개 변수는 파일의 메타 데이터에서 자동으로 채워집니다.
| 5. | 로 진행 카메라 매칭 및 해결. |
오토 파노 가져 오기에 대한 참고 사항
현재 제한 사항 .pano 수입은 다음과 같습니다.
• Autopano의 기능 일치는 CaraVR의 일치로 변환되지 않습니다.
• 어안 렌즈를 사용하는 리그 만 수입 할 수 있습니다.
• Autopano의 어안 모델은 CaraVR에서 구현 한 것과 다릅니다. 다른 응용 프로그램의 가져 오기 절차와 마찬가지로 값이 변환되므로 왜곡이 정확하게 일치하지 않습니다.
연속적인 리그 가져 오기
그만큼 Back to Back 프리셋은 180도 이상의 시야를 가진 2 개의 카메라 어안 굴착 장치를 해결하도록 설계되었습니다. 사전 설정을 사용하려면
| 1. | 고르다 Back to Back ~로부터 Preset 쓰러지 다. |
| 2. | 딸깍 하는 소리 Setup Rig. |
리그 설정 대화 상자가 표시됩니다.
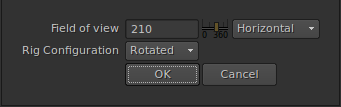
| 3. | 들어가다 Field of view 선택 Horizontal, Vertical 또는 Diagonal 장비에 따라 |
팁: 당신이 확실하지 않은 경우 Field of viewC_CameraSolver의 글로벌을 추정하고 조정합니다 focal length 따라서 클릭 후 OK.
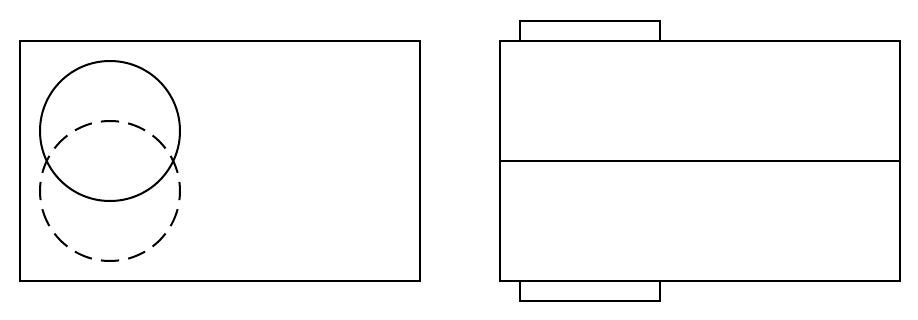
| 4. | 설정 Rig Configuration 다른 렌즈 위치를 설명하기 위해 : |
• Rotated -렌즈는 수직으로 정렬되지만 수평으로 정렬되지는 않습니다.
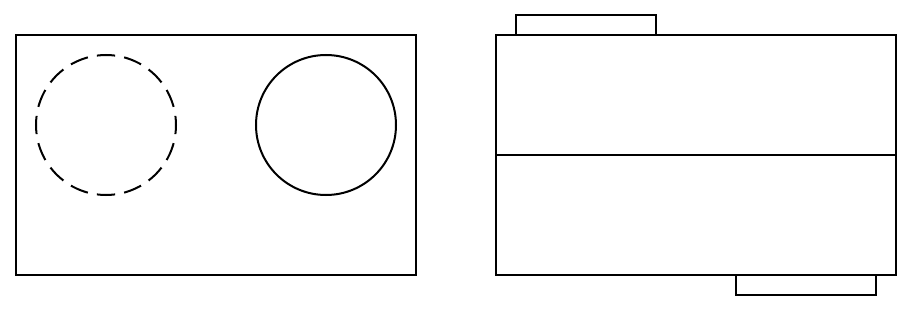
• Flipped -렌즈는 수평으로 정렬되지만 수직으로 정렬되지는 않습니다.
| 5. | 딸깍 하는 소리 OK. |
| 6. | 로 진행 카메라 매칭 및 해결. |
노트 : 두 대의 카메라, 연속적인 리그는 카메라 간의 겹침이 없기 때문에 C_Stitcher에 문제를 일으킬 수 있습니다. 보다 백투백 리그의 오버랩 개선 자세한 내용은.
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.