카메라 매칭 및 해결
리그를 설정 한 후 다음 단계는 리그에 대한 카메라 속성을 설정하고 겹치는 카메라간에 일치하는 위치를 찾고 서로에 대한 카메라 위치를 해결하는 것입니다.
| 1. | 그만큼 Analysis 섹션을 사용하여 리그의 카메라 속성을 변경할 수 있습니다. 기본적으로 CaraVR은 모든 카메라의 초점 거리가 동일하고 렌즈 왜곡이 없으며 구면 레이아웃을 가정합니다. |
설정 Focal Length 설명하기 위해 :
• Known Focal Length -기존 초점 거리를 해결에 고정합니다.
• Optimize per Camera -리그에있는 각 카메라의 초점 거리를 계산합니다.
• Optimize Single -리그의 모든 카메라에 대해 최적화 된 단일 초점 거리를 계산합니다.
| 2. | 설정 Lens Distortion필요한 경우CaraVR은 가정 No Lens Distortion 기본적으로는 Focal Length, 다음을 설명 할 수 있습니다. |
• Known Distortion -솔버에서 렌즈 왜곡을 수정합니다.
• Optimize per Camera -리그 내 각 카메라의 렌즈 왜곡을 계산합니다.
• Optimize Single -리그의 모든 카메라에 대해 최적화 된 단일 렌즈 왜곡을 계산합니다.
| 3. | 설정 Camera Layout 당신은 사용하려고합니다 : |
• Nodal Layout -모든 카메라는 장면 원점에 있습니다. 예를 들어 360도 스틸을 촬영하는 단일 DSLR은이 노드 레이아웃 설정을 사용합니다.
• Spherical Layout -리그의 카메라는 직경이 Rig Size 에 대한 제어 Cameras 탭의 기본값은 30cm입니다.
• Horizontal / Vertical / Planar Layout -리그의 카메라는 선택에 따라 단일 라인 또는 평면에 배치됩니다.
• Free Layout -카메라 위치에 제약이 없습니다.
노트 : 그만큼 Horizontal, Vertical , Planar , Free 레이아웃은 실험적입니다. 연락주세요 support.foundry.com Foundry와 공유하고 싶은 의견이 있으면
팁: 설정 Rig Size 사용중인 장비의 실제 크기를 제어하면 다른 장비에 대한 실제 측정 값을 입력 할 수 있습니다 Cameras 같은 컨트롤 Focal Length.
여러 대의 카메라를 사용하고 동시에 촬영하는 리그는 일반적으로 구형 구성으로되어있어 Convergence 장면 사이의 다른 깊이에서 이미지 정렬을 확인하기 위해 카메라 간. 보다 구면 리그의 수렴 조정 자세한 내용은.
| 4. | CaraVR은 시퀀스 시작 부분에 자동으로 단일 키 프레임을 추가하여 장면의 고정 점에 해당하는 일련의 기능 일치를 정의하지만 다음을 통해 수동으로 키 프레임을 추가 할 수 있습니다. |
• 뷰어에서 스크러빙 한 다음 Add Key (![]() )를 눌러 현재 프레임에 키 프레임을 추가하거나
)를 눌러 현재 프레임에 키 프레임을 추가하거나
• 클릭 Key All 에서 시퀀스 전체에 걸쳐 키 프레임을 추가 Step 간격.
• 클릭 Import 키 프레임을 가져 오려는 노드를 선택합니다. 스크립트의 C_CameraSolver, C_Stitcher 또는 C_ColourMatcher 인스턴스에서 키 프레임을 가져올 수 있습니다.
더 많은 키 프레임을 추가할수록 프로세스 시간이 오래 걸리지 만 더 나은 결과를 얻을 수 있습니다.
노트 : C_Stitcher는 지정된 키 프레임에서 광학 플로우 카메라 왜곡 만 계산하며 동일한 키 프레임에 속하지 않는 업스트림 애니메이션은 무시합니다. 사용 Import 버튼을 눌러 C_CameraSolver의 모든 키 프레임을 복사하십시오. 이런 식으로 카메라에 추가 된 모든 수동 키 프레임이 Cameras 탭도 복사됩니다.
팁: 절점 레이아웃이있는 리그를 해결하는 경우 Settings 탭하고 활성화 Solve for animated cameras 각 분석 키 프레임에서 카메라 매개 변수에 대한 애니메이션 값을 계산합니다.
이 설정은 다양한 장면 깊이를 보정하도록 카메라를 자동으로 조정하여 모노 360 노달 스티치에서 고 스팅을 제거하는 데 도움이됩니다.
그러나이 설정은 카메라 위치가 고정 된 경우 이상한 결과를 초래할 수 있습니다. 분석 키에서 카메라 회전이 변경되면 배경 장면이 이동 될 수 있습니다.
| 5. | 딸깍 하는 소리 Match 겹치는 카메라의 키 프레임을 공유 기능과 비교합니다. CaraVR은 기본적으로 겹치는 카메라에서 일치하는 항목 만 찾습니다. |
노트 : Match 는 리그에있는 모든 카메라의 기능 일치를 동시에 계산하므로 스테레오 설정에서 좌우 이미지에 대해 별도로 계산할 필요가 없습니다. 보다 바느질 입체 그래픽 리그 자세한 내용은.
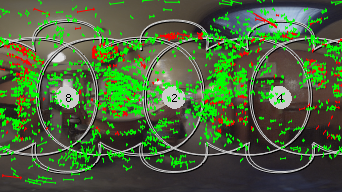
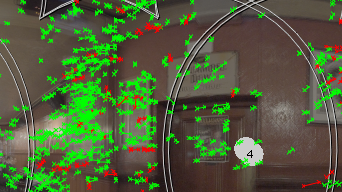
처음에는 카메라와 일치하는 모든 기능이 뷰어에서 서로 오버레이됩니다. 리그에서 카메라를 풀거나 두 번째 이미지와 같이 뷰어를 확대 할 때까지 개별 경기가 표시되지 않습니다.
|
|
|
|
뷰어 확대 / 축소 수준이 다른 모든 카메라의 기능이 일치합니다. |
|
노트 : 일치는 재생 헤드가 키 프레임에있을 때만 표시됩니다.
리그의 카메라를 단계별로 살펴보면 뷰어 위의보기 단추를 사용하여 일치 항목을 검사 할 수 있습니다. 알파 채널 만 표시하도록 뷰어를 전환하면 각보기에 적용된 기본 마스크를 검사 할 수도 있습니다.
|
|
|
|
단일 카메라에서 기능이 일치합니다. |
기본 알파 채널 마스크 |

리그가 해결되면 대기 시간이 긴 공간에서 겹치는 카메라 간의 일치 항목을 볼 수도 있습니다. Cam Projection 드롭 다운 Latlong.
|
|
|
단일 카메라에서 기능 일치 |
보다 일치 및 해결 문제 해결 경기 결과 개선에 대한 자세한 내용은
| 6. | 딸깍 하는 소리 Solve 선택된 리그의 지오메트리를 계산하여 리그의 다른 카메라에 대한 각 카메라의 위치와 방향을 정의하고 일치하는 이미지를 올바른 순서로 정렬합니다. |
노트 : 해결은 리그에있는 모든 카메라의 형상을 동시에 계산하므로 스테레오 설정에서 왼쪽 및 오른쪽 이미지에 대해 별도로 계산할 필요가 없습니다. 보다 바느질 입체 그래픽 리그 자세한 내용은.
리그에서 카메라에 일치하는 모든 포인트를 포함하여 해결 된 미리보기 이미지가 뷰어에 표시됩니다.
|
|
|
|
해결 된 카메라 및 기능은 서로 다른 뷰어 확대 / 축소 수준에서 일치합니다. |
|
| 7. | 로 전환 Camera 모드 ( |
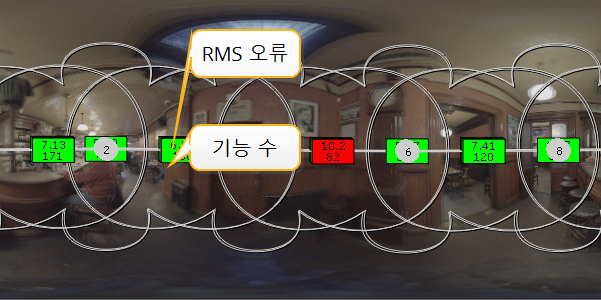
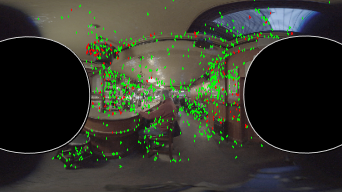
녹색 오버레이는 아래의 RMS 오류를 나타냅니다. Error Threshold 빨간색은 임계 값을 초과하는 오버레이입니다.
노트 : 오버레이는 재생 헤드가 키 프레임에있을 때만 표시됩니다.
보다 일치 및 해결 문제 해결 일치하는 기능을 수정하고 해결하는 방법에 대한 정보.
| 8. | 를 눌러 오버레이를 끕니다. Q 뷰어를 통해 결과를 봅니다. |
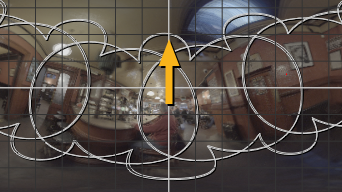
| 9. | 뷰를 함께 스티칭하기 전에 해결 된 카메라가 수평선을 정확하게 맞추기 위해 약간의 작업이 필요할 수 있습니다. CaraVR은 이미지를 올바른 방향으로 자동 배치하지 않을 수 있습니다. |
CaraVR은 수평선을 맞추는 두 가지 방법을 제공합니다. Transform 에 컨트롤 Settings 탭 및 뷰어 도구 모음.
• Transform Controls -C_CameraSolver를 엽니 다 Properties 패널을 클릭하고 Settings 탭. 조정 rotate x,y, z 카메라를 프레임 또는 적도의 절반 아래에 평평한 선으로 정렬합니다.
• Viewer toolbar -활성화 Horizon 도구를 누른 다음 Ctrl/Cmd+Alt 수평선을 조정하려면 뷰어에서 드래그하십시오.
|
|
|

노트 : 이 방법으로 개별 카메라를 이런 방식으로 조정할 수도 있습니다. Camera 대신 도구.
| 10. | 를 사용하여 필요한 출력 해상도를 설정하십시오 Format 필요한 경우 드롭 다운. |
팁: CaraVR은 Properties 의 패널 Nuke와 같은보기 그룹을 빠르게 선택할 수있는 쓰기 노드 stereo 과 cams 미리보기 또는 스티치를 렌더링 할 때. 여전히을 사용하여보기를 수동으로 선택할 수 있습니다 views 드롭 다운 View Presets 프로세스가 더 빨라질 수 있습니다.
| 11. | 부정확 한 기능 일치 또는 해결 된 카메라에 대한 자세한 내용은 일치 및 해결 문제 해결 이미지를 스티칭하기 전에 섹션. |
해결 된 리그가 있으면 다양한 사전 설정 노드로 내보낼 수 있습니다 (참조 사전 설정 노드로 내보내기 자세한 내용을 보려면) 이미지를 함께 스티칭 미리보기를 함께 스티치하거나 C_ColourMatcher 스티칭 전에 C_ColourMatcher를 사용합니다.
도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.