이미지를 함께 스티칭
CaraVR은 C_Stitcher를 사용하여 C_CameraSolver의 여러 입력 이미지 사이를 뒤틀리고 블렌딩하여 구형 위도를 생성합니다. 보다 바느질 입체 그래픽 리그 스테레오 리그를 꿰맨다면
시퀀스를 스티치하려면 :
| 1. | C_Stitcher 노드를 C_CameraSolver 노드의 출력에 연결하십시오. |
| 2. | CaraVR은 현재 프레임에 단일 키 프레임을 자동으로 추가하지만 다음 중 하나를 통해 수동으로 키 프레임을 추가 할 수 있습니다. |
• 뷰어에서 스크러빙 한 다음 Add Key (![]() )를 눌러 현재 프레임에 키 프레임을 추가하거나
)를 눌러 현재 프레임에 키 프레임을 추가하거나
• 클릭 Key All 에서 시퀀스 전체에 걸쳐 키 프레임을 추가 Step 간격.
시퀀스에서 많은 움직임이있는 경우 Step 프레임들 사이의 더 큰 차이가 스티치에서 설명 될 수 있도록 더 낮은 값으로 인터벌을가한다. 값이 높을수록 더 나은 결과를 얻을 수있는 정적 시퀀스가 많을수록 반대가됩니다.
• 클릭 Import 키 프레임을 가져 오려는 노드를 선택합니다. 스크립트의 C_CameraSolver, C_Stitcher 또는 C_ColourMatcher 인스턴스에서 키 프레임을 가져올 수 있습니다.
노트 : C_Stitcher는 지정된 키 프레임에서 광학 플로우 카메라 왜곡 만 계산하며 동일한 키 프레임에 속하지 않는 업스트림 애니메이션은 무시합니다. 사용 Import 버튼을 눌러 C_CameraSolver의 모든 키 프레임을 복사하십시오. 이런 식으로 카메라에 추가 된 모든 수동 키 프레임이 Cameras 탭도 복사됩니다.
키 프레임을 수동으로 추가하면 보간이 정확하지 않은 기존 키 프레임 사이의 흐린 영역에 도움이됩니다.
더 많은 키 프레임을 추가할수록 프로세스 시간이 오래 걸리지 만 더 나은 결과를 얻을 수 있습니다. 스티 처는 입력 이미지를 뒤틀리고 혼합하여 최종 뒤틀린 프레임을 만듭니다.
| 3. | 전후 이미지를 보려면 전환 Enable Warps 켜짐 및 꺼짐. |
|
|
|
|
워프 시퀀스 |
워프가 활성화 된 시퀀스입니다. |


| 4. | 사용 Override Cameras 사용하기 위해 Cameras 의 탭 Properties 뒤틀린 카메라를 선택합니다. |
에서 카메라를 활성화 및 비활성화하여 스티치 출력에서 입력 카메라의 모든 조합을 볼 수 있습니다. Selected 탭. 그만큼 Preset 드롭 다운 메뉴에서 스티치의 모든 카메라를 빠르게 활성화 또는 비활성화 할 수 있습니다. All 또는 None.
예를 들어, 두 카메라 사이의 스티치를 분리하여 검사하려면 None ~로부터 Preset 드롭 다운 메뉴에서 관심있는 카메라를 활성화하십시오.
| 5. | 사용 Vectors 입력 이미지에서 왜곡을 생성하는 데 사용되는 벡터의 품질을 제어하려면 속성의 탭을 클릭하십시오. |
값이 클수록 더 나은 왜곡이 발생하지만 계산 시간이 길어집니다.
노트 : 벡터는 키 프레임에서만 계산되며보다 빠른 보간은 그 사이의 프레임을 처리합니다. 따라서 키 프레임이 많을수록 스티치 시간이 오래 걸립니다.
보다 스티치 문제 해결 자세한 내용은.
| 6. | 사용 Blend 드롭 다운 메뉴에서 기본 모드로 전환 Alpha 방법, Multi-Band, Spherical Multi-Band 모드. 멀티 밴드 블렌딩은 블렌드 영역 과정에서 저주파 색상 변화를 일치시켜 스티치 결과를 향상시킬 수 있지만 기본값보다 처리 속도가 느릴 수 있습니다 Alpha 방법. 구형 멀티 밴드 블렌딩을 사용하면 극에서 스티치 결과를 개선하여 위 또는 아래로 볼 수 있습니다. |
당신은 사용할 수 있습니다 Suppression 사용시 인접 뷰 사이에 적용되는 블렌딩 양을 조정하는 컨트롤 Multi-Band 블렌딩. 값이 낮을수록 혼합 이미지 간의 색상과 노출의 균형을 유지하는 데 도움이되며 값이 높을수록 기본값의 결과에 더 가깝습니다 Alpha 혼합 모드.
노트 : 다중 대역 블렌딩은 C_Stitcher에서 내 보낸 뷰당 C_STMap에는 영향을 미치지 않습니다. 보다 사전 설정 노드로 내보내기 C_STMaps 내보내기에 대한 자세한 정보는
C_STMaps를 내보내려면 활성화해야합니다. Multi-Band 별도의 스트림을 다시 병합 할 때 C_Blender에서 블렌딩. 그러나 C_Blender는 재 샘플링 된 입력 이미지를 사용하므로 결과는 C_Stitcher의 출력과 일치하지 않습니다. 보다 여러 뷰를 함께 혼합 자세한 내용은.
팁: CaraVR은 Properties 의 패널 Nuke와 같은보기 그룹을 빠르게 선택할 수있는 쓰기 노드 stereo 과 cams 미리보기 또는 스티치를 렌더링 할 때. 여전히을 사용하여보기를 수동으로 선택할 수 있습니다 views 드롭 다운 View Presets 프로세스가 더 빨라질 수 있습니다.
구형 리그에서 수렴 점 설정
구형 카메라 레이아웃을 사용하는 경우 Converge 카메라가 겹치는 깊이를 제어하여 장면의 단일 관심 지점에 초점을 맞출 수 있습니다.
노트 : 모든 카메라가 동일한 원점을 공유하므로 수렴은 노드 리그에 영향을 미치지 않습니다.
카메라가 구 위에 앉아 있다고 가정하면 구의 크기를 변경하면 카메라가 수렴되는 각도에 영향을줍니다. C_Stitcher는 Rig Size C_CameraSolver 's에서 설정 Cameras 구를 제어하려면 탭. 이는 솔질의 품질에 따라 리그의 3D 표현을 실제 단위에 가깝게 정규화합니다. 그만큼 Converge 그런 다음 제어는 스티치가 수렴되는 깊이를 정의하여 필요한 관심 영역에 초점을 맞 춥니 다.
|
|
|
|
2m 수렴 |
10m 수렴 |
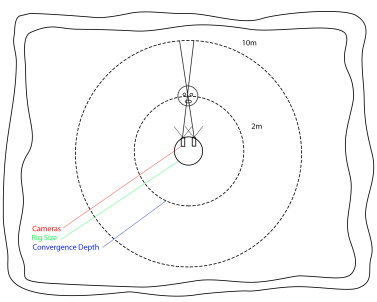
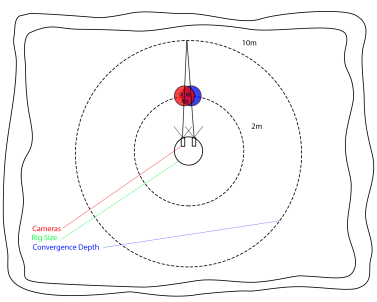
전경에서 수렴 점을 설정하면 왼쪽에 표시된 것처럼 배경에서 고 스팅이 발생할 수 있습니다. 오른쪽에 표시된 것처럼 반대도 마찬가지입니다. 수렴 점이 백그라운드에있는 경우 고 스팅이 전경에 나타날 수 있습니다.
일부 리그에서는 수렴 값이 높은 백그라운드에서 올바른 스티치를 생성하고 수렴 값이 낮은 전경에서 올바른 스티치를 생성해야합니다.
팁: 설정하면 Converge C_CameraSolver에서 제어 할 수 있습니다. Auto 오른쪽에 Converge C_Stitcher의 제어 Properties 패널.
이 예는 기본값을 사용하여 수렴 깊이를 보여줍니다. Rig Size 설정 0.3 (또는 30cm). 그만큼 Converge 제어 기본값 10전경의 변을 고려할 때 약간 높습니다.

감소 Converge 주위에 가치 1.6 미터는 대변을 멋지게 집중시킵니다.

도움이되지 않은 죄송합니다
왜 도움이되지 않습니까? (해당되는 모든 것을 체크하세요)
의견을 보내 주셔서 감사합니다.
찾고있는 것을 찾을 수 없거나 워크 플로 관련 질문이있는 경우 시도해보십시오 파운드리 지원.
학습 내용을 개선 할 수있는 방법에 대한 의견이 있으시면 아래 버튼을 사용하여 설명서 팀에 이메일을 보내십시오.
의견을 보내 주셔서 감사합니다.