C_CameraSolver
C_CameraSolver允许您校准装备,建立相机之间的关系模型并生成针迹预览。C_CameraSolver包含一系列装备预设,您可以将其用作求解的起点,例如6台摄像机Freedom360和14台摄像机H3PRO14。CaraVR还支持您手动校准的自定义装备,以及支持使用PTGui和Autopano创建的装备的导入功能。 .pts和.pano格式。
注意: CaraVR仅支持PTGui版本10 .pts文件或更早版本。如果您使用的是更高版本的PTGui,请确保使用PTGui 10 Project导出选项。
|
|
|
|
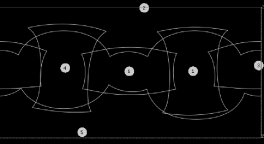
Freedom360钻机 |
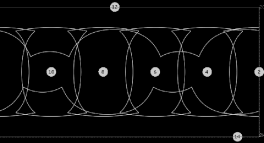
H3PRO14钻机 |
看到准备摄影机了解更多信息。
C_CameraSolver会提供有关装备的元数据和下游的原始源图像,以供以后的节点(最重要的是C_Stitcher和C_ColourMatcher)访问。这两个节点都需要此信息来执行其任务,从而使C_CameraSolver成为引擎工具,位于每个针迹脚本的顶部。
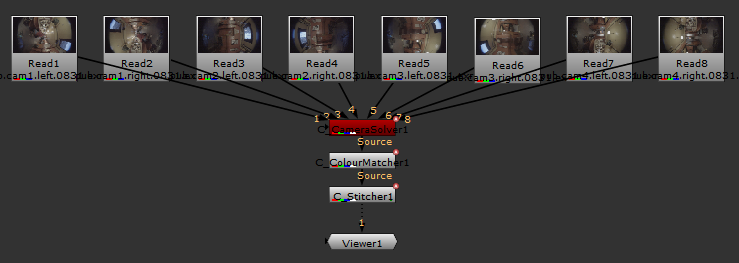
C_CameraSolver可以为装备建立节点和球面表示。球形钻机通常在物理上更正确。如有必要,求解器可以从头开始估计钻机布局和透镜参数,并提供许多工具来微调和手动配置布局。
看到匹配和解决相机了解更多信息。