使用网格估算镜头失真
网格分析可估计棋盘格或细线网格的失真。通常,如果您有网格可以用来计算镜头失真,则应该使用网格分析。Grids从构造Features和Links,它们是自动计算的。
|
|
|
|
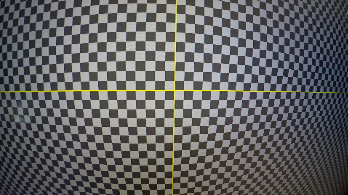
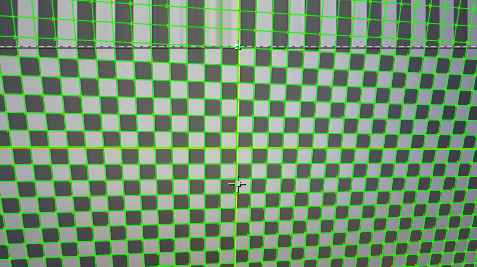
原始扭曲的镜头 |
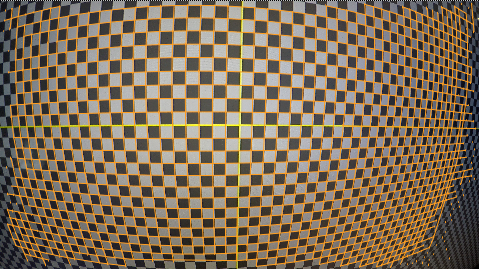
相关格网射击 |

要使用网格估计失真:
| 1. | 阅读您的网格并连接一个LensDistortion节点,然后连接一个Viewer。 |
| 2. | 设置LensDistortion > Lens Type和Advanced > Projection Model使用LensDistortion中的下拉菜单Properties面板。在这个例子中,镜头是Spherical和None (Rectilinear),但其中包含许多其他预设。 |
| 3. | 如果您使用鱼眼镜头,则需要对眼镜进行“去鱼”操作。您可以通过选择正确的方法Advanced >ProjectionModel设置,例如Fisheye Equisolid,进入Focal Length和Sensor Size。 |
小费: 如果你不知道Focal Length,设置输出Mode至Undistort并调整Focal Length直到图像中的曲线看起来近似笔直。别忘了切换回Mode > STMap在继续之前。
| 4. | 设置Model Preset用于估计。Nuke随附与CaraVR和3DEqualizer一起使用的几种型号,以及NukeX Classic模型。 |
您选择的模型设置合适Advanced > Distortion控制并填充只读Equation显示估算中涉及的数学的字段。
| 5. | 单击时,LensDistortion节点默认在当前帧上添加关键帧Detect,但是您可以使用添加更多 |
对于长序列,添加关键帧可以产生更好的结果,但是计算结果花费的时间更长。
| 6. | 在Analysis标签,点击Detect开始网格校准。 默认情况下, Nuke寻找Features在网格上,然后创建Links在这些特征之间创建失真网格。 |
您可以启用Preview查看单击时,LensDistortion节点可能会找到的功能Detect按钮。
小费: 对于困难的拍摄,您可以在Features和Links检测以改善结果。看到调整网格检测参数了解更多信息。
检测步骤完成后,将显示网格覆盖。
小费: 如果网格不能覆盖大部分图像,请尝试增加Number of Features的价值Analysis 标签并点击Detect再次。
| 7. | 请点击Solve估计使用网格的失真。 |
Nuke估计失真并显示新的覆盖图和整体Solve Error。默认输出Mode是Undistort,因此反失真会自动应用于图像。
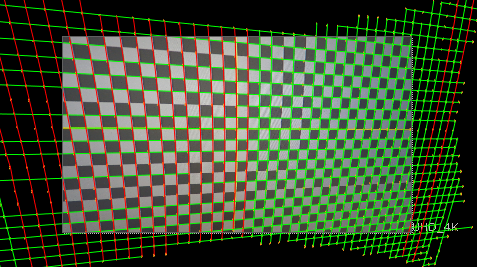
绿线表示属于Detection Threshold值和红线超出阈值的那些。您可以将鼠标悬停在链接上以显示其解决错误。

| 8. | 点击Solve在某些情况下再次可以改善结果。您也可以先优化检测和链接,然后再使用Analysis标签。看到调整网格检测参数了解更多信息。 |
注意: 您还可以将失真输出作为STMap以便在其他图像中使用。STMap将预先计算的翘曲数据包含在motion通道,使您可以快速轻松地应用变形。看到使用STMaps了解更多信息。
Nuke提取估计的失真并使用结果“拉直”特征链接。
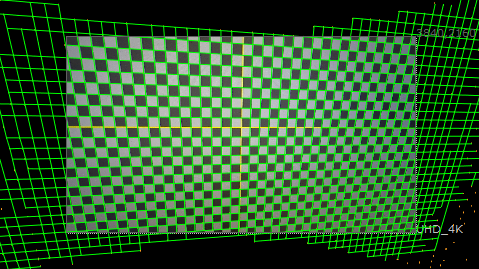
边框增加到超出格式大小的范围,以包括来自输入图像的所有图像数据。
| 9. | 您可以使用BBox和Output Format控制LensDistortion标签。 |
图像上没有数据的任何区域都会被过度扫描,这意味着最后一个可用像素被复制到格式的边缘。图像顶部的区域显示过扫描。
您还可以使用来将更多图像数据带入格式范围BBox和Output Format控件。
| 10. | 继续消除图像中的镜头变形要么调整网格检测参数调整网格。 |