検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
ワープのマッチングと解決
C_GlobalWarpは、C_CameraSolverで採用されている機能検出と同様の機能検出を使用して、隣接するカメラペアのオーバーラップ領域で機能を特定します。ワープはこれらの機能を使用して、各入力ビューの最適なグリッドワープ変形を見つけ、ゴーストを低減します。
シーケンスをワープするには:
| 1. | C_GlobalWarpノードをC_CameraSolverノードの出力に接続します。 |
| 2. | CaraVRは現在のフレームに単一のキーフレームを自動的に追加しますが、次のいずれかの方法でキーフレームを手動で追加できます。 |
• ビューアでスクラブしてからクリックするAdd Key (![]() )現在のフレームにキーフレームを追加する、または
)現在のフレームにキーフレームを追加する、または
• クリックKey Allシーケンス全体にキーフレームを追加するにはStep間隔。
シーケンスに多くの動きがある場合は、 Step間隔を小さくして、ステッチでフレーム間の大きな差が考慮されるようにします。より高い値がより良い結果を生むかもしれないより多くの静的なシーケンスには反対が当てはまります。
• クリックImportキーフレームをインポートするノードを選択します。スクリプトのC_CameraSolver、C_Stitcher、C_GlobalWarp、またはC_ColourMatcherの任意のインスタンスからキーフレームをインポートできます。
C_CameraSolverの一致もデフォルトでインポートされます。ソルバーからの一致が不要な場合は、無効にしますImport available matches。
注意: C_Stitcherは、指定されたキーフレームでオプティカルフローカメラワープのみを計算し、同じキーフレームに該当しないアップストリームアニメーションを無視します。使用Import C_CameraSolverからすべてのキーフレームをコピーするボタン。このようにして、カメラごとの追加の手動キーフレームがCamerasタブもコピーされます。
キーフレームを手動で追加すると、補間が不正確な既存のキーフレーム間のぼやけた領域で役立ちます。
キーフレームを追加するほど、プロセスに時間がかかりますが、より良い結果が得られる場合があります。グローバルワーパーは、入力画像をブレンドして、最終的なワープフレームを作成します。
| 3. | クリックMatch 共有機能の重複するカメラのキーフレームを比較します。CaraVRは、デフォルトでオーバーラップするカメラの一致のみを検索します。 |
注意: Matchリグ内のすべてのカメラの特徴の一致を同時に計算するため、ステレオ設定の左右の画像について個別に計算する必要はありません。見るステレオグラフィックリグのステッチ詳細については。
| 4. | クリックCamera Matches |
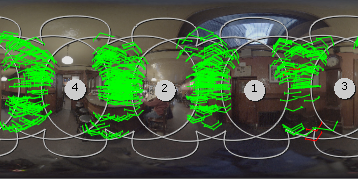
カメラの一致は、両方のビューでの単一の特徴と、その特徴の推定されたワープの宛先を表します。たとえば、画像にはビュー2と4に煙探知器が表示され、その間にワープデスティネーションポイントがあります。
|
|
|
|
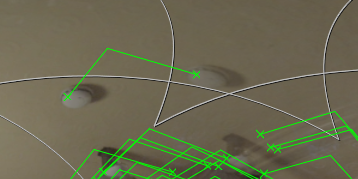
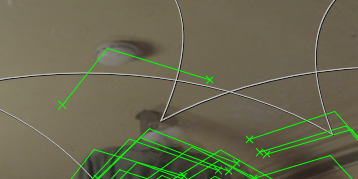
プリワープマッチ。 |
ワープ先。 |
| 5. | クリックWarpワープを計算します。 |
注意: ワープはリグ内のすべてのカメラに対して同時に計算されるため、ステレオ設定の左右の画像について別々に計算する必要はありません。見るステレオグラフィックリグのステッチ詳細については。
ワーププレビューイメージがビューアに表示されます。見るマッチとワープのトラブルシューティング反り結果の改善に関する情報。
最初のグローバルワープに満足したら、制約を追加して、直線的な入力画像の既知の直線のゆがみを減らすことができます。見るワープの制約詳細については。
申し訳ありませんが、これは役に立ちませんでした
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がある場合は、下のボタンを使用してドキュメントチームにメールを送信してください。
フィードバックをお寄せいただきありがとうございます。