検索はキーワードに基づいています。
例:「手順」
自然言語で検索しないでください
例:「新しいプロシージャを作成するにはどうすればよいですか?」
平面IK

インバースキネマティクス(IK)は、ソフトウェアがジョイントの曲げを計算するアイテムをアニメーション化する方法です。 ゴールオブジェクトの位置に基づきます。にModo、ゴールオブジェクトは通常ロケーターです。一連のアイテムにIKを設定すると、ゴールアイテムが動き回り、必要に応じてジョイントの回転を変更したときに、IK階層により、アイテムがゴールに到達し続けます。
IKを使用すると、複数の個別のアイテムの回転をアニメートするよりも、1つのアイテム(目標)の位置をアニメートする方がはるかに簡単です。たとえば、IKを使用してドアノブで手をアニメートするには、ゴールをドアノブに配置して、手がシーンの適切な場所にあるようにします。標準的な階層では、手の正しい位置を見つけるために、肩と肘の両方を個別に回転させる必要があります。
ModoのPlanar IKシステムは、前の例で述べた腕などのデュアルジョイントに適していますが、動物の脚などの3つのロケータジョイントをアニメートすることもできます。
注意: また、より強力な全身IKシステム全体。キャラクター全体を装備できます。
ロケーターのチェーンにIKを適用する
アイテムのチェーンにIKを適用するには、まず階層を作成します。
• 降順のチェーンでアイテムを互いにペアレント化します。
• センターの位置も適切な場所にあることを確認してください。ためにModo IKを正しく計算するには、すべてのCenter位置が同じ平面に表示されるように、少なくとも1つの軸値を共有する必要があります。
• チェーンが曲がっていることを確認してください。 Modo IKを適用します。曲げに適切な角度を使用できます。
ヒント: 3Dビューポートでオーバーレイ描画を有効にして、メッシュ内にジョイントを表示します。
| 1. | アイテムの順序が決まったら、降順でアイテムを選択します。 |
| 2. | セットアップモードをクリックしてセットアップモードに入ります |
3Dビューポートの周りに黄色のフレームが表示され、セットアップモードであることを示します。
注意: セットアップモードの使用の詳細については、を参照してください。 バインドおよびセットアップモード。
| 3. | 設定ツールバーで、 Inverse Kinematicsタブ以下Planar IK、 クリックApply IKボタン。 |

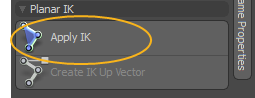
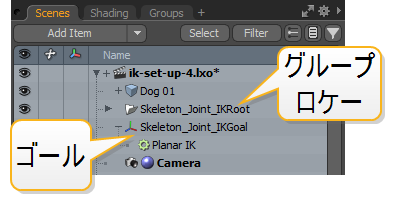
チェーンにIKモディファイヤを適用すると、ゴールアイテムが作成され、グループロケータがIKチェーンの全体的な親として追加されます。
注意: ジョイントが軸を共有していない場合、警告が表示されます。クリックOK X軸に沿ってアイテムを配置します。
| 4. | セットアップモードを終了します。 |
ゴールアイテムを動かすことで、 Modo IKチェーンのジョイントの角度を変更します。

FKを現在のIK位置に一致させる
ゴールアイテムを移動し、フォワードキネマティクス(FK)をその位置に一致させる場合、現在のIK位置を使用するようにFKを設定できます。
| 1. | ゴールロケーターを選択します( Skeleton_Joint_IKGoalデフォルトでは)アイテムリストで、必要な位置に移動します。 |
| 2. | ゴールアイテムを選択すると、平面IKプロパティがPropertiesタブ。クリックSet FK to Current button。 |
| 3. | 設定してIKを無効にするBlend 0%に。 |
ジョイントチェーンの開始位置が新しい位置に移動します。
IKとFKのマッチング
を使用してチェーンを開始位置にリセットできます。 Reset SolverのIKボタンからProperties。これにより、たとえば、個々のジョイントの編集に戻ることができます。
| 1. | 目標項目を選択 アイテムリストで、 Properties右下のタブ。 |
| 2. | クリックReset Solver from IKボタン。 |
IKソルバーとジョイントチェーンが開始位置にリセットされます。
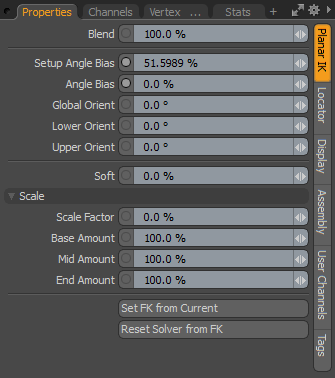
平面IKプロパティ
で目標項目を選択するItem List IKチェーンに関連するプロパティを表示します。
|
Blend |
100%の設定 IKソリューションを完全に使用します。100%未満の値はチェーンに対するIKの影響を減らし、0%の設定はそれを無効にします。 |
|
Setup Angle Bias |
チェーンの静止状態を指定します。この設定は、セットアップモードで調整して、チェーン内のジョイントにデフォルトの動作を与える必要があります。 |
|
Angle Bias |
チェーンの開始または終了に向かうジョイントのウェイト付けを制御します。セットアップモードを終了した後、 Angle Bias特定のアニメーションのチェーンの動作を変更するオプション。この金額はSetup Angle Bias。だからあなたが持っているならSetup Angle Bias 50%のAngle Bias 10%の場合、関節角度に使用される全体的なバイアスは60%です。 個別のコントロールを使用すると、アニメーションのバイアスに加えられた変更をやり直すことなく、セットアップモードでチェーンを調整できます。 注意: Angle Bias 3ジョイントチェーンでのみ使用できます。 |
|
Global Orient |
IKチェーンの平面方向の角度を指定します。たとえば、腕の場合、肘が向く角度を調整できます。 |
|
Lower Orient |
3ジョイントチェーンの下2つのジョイントの平面方向角度を指定します。 注意: Lower Orient 3ジョイントチェーンでのみ使用できます。 |
|
Upper Orient |
3ジョイントチェーンの上部2ジョイントの平面方向角度を指定します。 注意: Upper Orient 3ジョイントチェーンでのみ使用できます。 |
|
Soft |
ジョイントを延長しすぎると、デフォルトで目標位置にスナップします。この値を大きくすると、スナップが削除され、遷移が遅くなります。 |
|
Scale |
|
|
Scale Factor |
ゴールポイントがジョイントの長さの合計から離れすぎている場合、IKソルバーはジョイントをスケーリングして、ゴールの位置に合わせることができます。0%はスケーリングなしを意味し、100%の場合、ジョイントは完全にスケーリングされます。のBase、 Mid 、およびEnd Amount設定を使用すると、ジョイント全体のスケール量の分布を決定できます。 |
|
Base Amount |
最初のジョイントのみをスケーリングします。 |
|
Mid Amount |
中央のジョイントのみをスケーリングします。 |
|
End Amount |
最後のジョイントのみをスケーリングします。 |
|
Set FK from Current |
FKをIKの現在の位置に一致させます。これを行う方法の詳細については、 FKを現在のIK位置に一致させる。 |
|
Reset Solver from FK |
チェーンからIKを削除し、ジョイントを個別に編集できるようにします。これを行う方法の詳細については、 IKとFKのマッチング。 |
IKアップベクトルを作成
このベクトルはIKコンストレイントの上方向を定義し、アニメーション中にチェーンの向きを適切に保つのに役立ちます。のCreate IK Up Vectorボタンはに似ていますアップベクトルを割り当てコマンドロケータを作成して配置する必要がない場合を除きます。とCreate IK Up Vector、 Modo優先曲げ角度に基づいてロケータを自動的に生成します。新しいアップベクトルロケーターが利用可能になったら、アニメーション化してIKリグの方向を調整できます。これは、 Global Orient IKでの設定Propertiesパネル。IK Up VectorとGlobal Orient必要な方向を作成します。
役に立たなかったのでごめんなさい
なぜこれが役に立たなかったのですか? (当てはまるもの全てをご確認ください)
ご意見をいただきありがとうございます。
探しているものが見つからない場合、またはワークフローに関する質問がある場合は、お試しくださいファウンドリサポート。
学習コンテンツを改善する方法についてご意見がございましたら、下のボタンを使用してドキュメントチームにメールでお問い合わせください。
フィードバックをお寄せいただきありがとうございます。